





























63
EtherNet/IP On-Board communications
POWERXL DG1 SERIES VFD
MN040010EN—September 2016 www.eaton.com
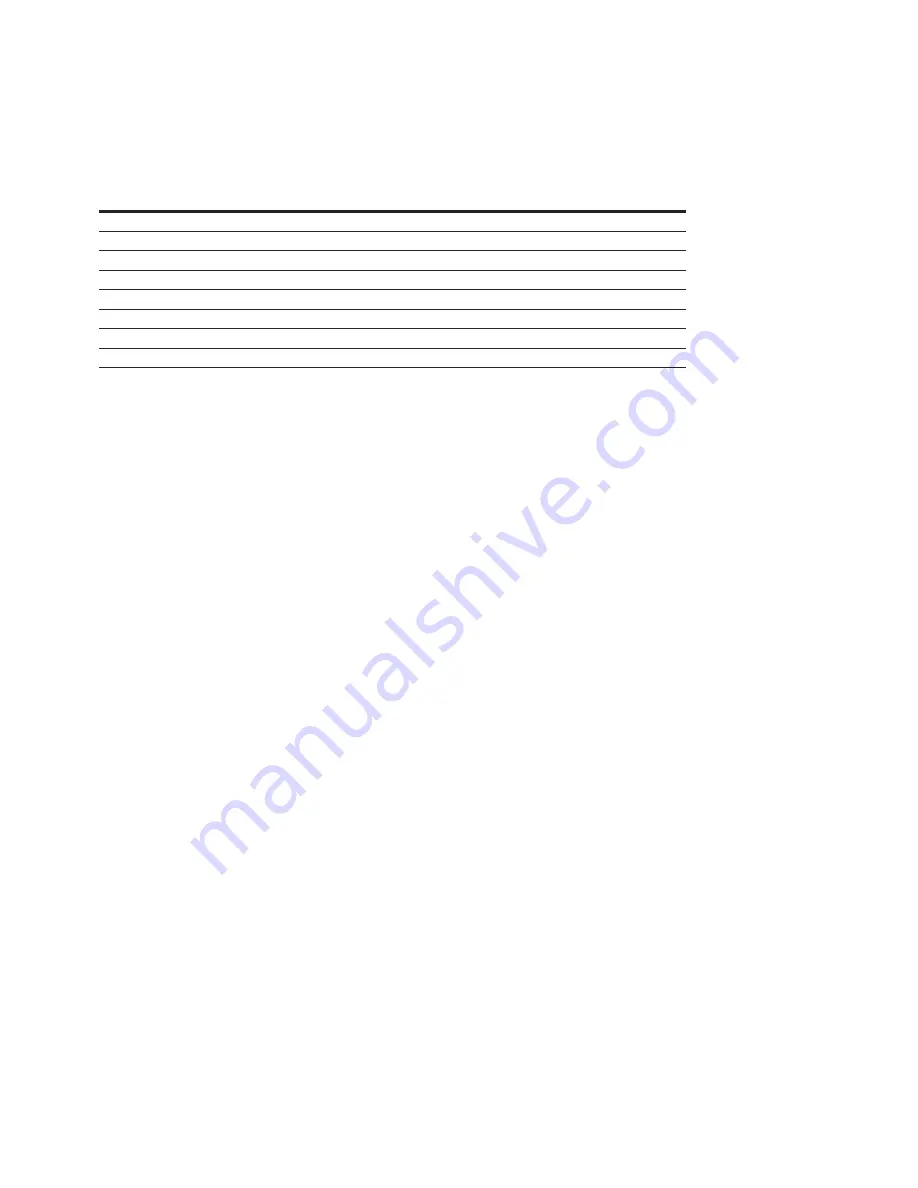
Assembly instance 101
Table 87. Insoance 101 (Ouopuo) lengoh = 8 byoes
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
NetRef
NetCtrl
FB DATAIN 2 FB DATAIN 1 FaultReset
RunRev
RunFwd
1
PDSELB3
PDSELB2
PDSELB1
PDSELB0
PDSELA3
PDSELA2
PDSELA1
PDSELA0
2
FBSpeed reference (Low Byte), rpm
3
FBSpeed reference (High Byte), rpm
4
FBProcessDataIn1 (Low Byte)
5
FBProcessDataIn1 (High Byte)
6
FBProcessDataIn2 (Low Byte)
7
FBProcessDataIn2 (High Byte)
Noee:
N
Process data is sent to the drive independently from the NetRef and NetCtrl bits settings.
This allocates 4 input data words and 4 output data words. Byte 1 of the 101 Output assembly
selects which Process Data out selection is read back to the EIP scanner. Bytes 4 through 7 of
the 101 Output assembly are application specific.
Select the Multi-purpose application to read data other than what is set as default Process Data.
Default Fieldbus Process data out selections 1 through 8 are:
1 = Output frequency (hertz)
2 = Motor Speed (rpms)
3 = Motor Current (amps)
4 = Motor Torque (% of nominal motor torque)
5 = Motor Power (% of nominal motor power)
6 = Motor Voltage (Calculated motor voltage)
7 = DC Bus Voltage
8 = Active Fault Code
Multipurpose has a “Fieldbus” group where you reference the FBProcessDataOUT1 through
FBProcessDataOUT8 selections. Referring to the 101/107 I/O assembly sheet, bits
PDSELx0–PDSELx3 in each “nibble” of Byte 1 of Output Assembly 101 are used to select which
FBProcessDataOUT (1–8) you “read” back to your PLC. That is integer 1 through 8 converted to
binary Bit 0 through Bit 3. Any parameter or monitored value can be read using the Multi-purpose
application, as long as it references a specific ID number. Whichever ProcessDataOutput selector
used from 1 through 8 dictates what bits are used in Byte 1 of the output assembly 101. Values
are then sent via Input Assembly 107 in Bytes 4 and 5 and Bytes 6 and 7 respectively. If all
PDSELxx values are zero, the “Drive state” will be selected at Byte1 location of 107 assembly.
Speed Reference commands for Instances 20, 21, 23, and 101 are set up to send the RPM
value. This value is sent based off the Motor Nameplate setting provided in the drive. This would
be the direct RPM value written.







































































