





























Power Brick Controller User Manual
Manual Motor Setup
159
I2T Protection
– Motor[
x
].I2TSet, I2TTrip, MaxDac
The Power Brick Controller can be set up to trigger a fault if the time-integrated command output exceeds
a certain threshold. This can protect the motor (and drive) from damage due to overheating. It integrates
the square of the command over time – commonly known as I2T "eye-squared-tee" protection.
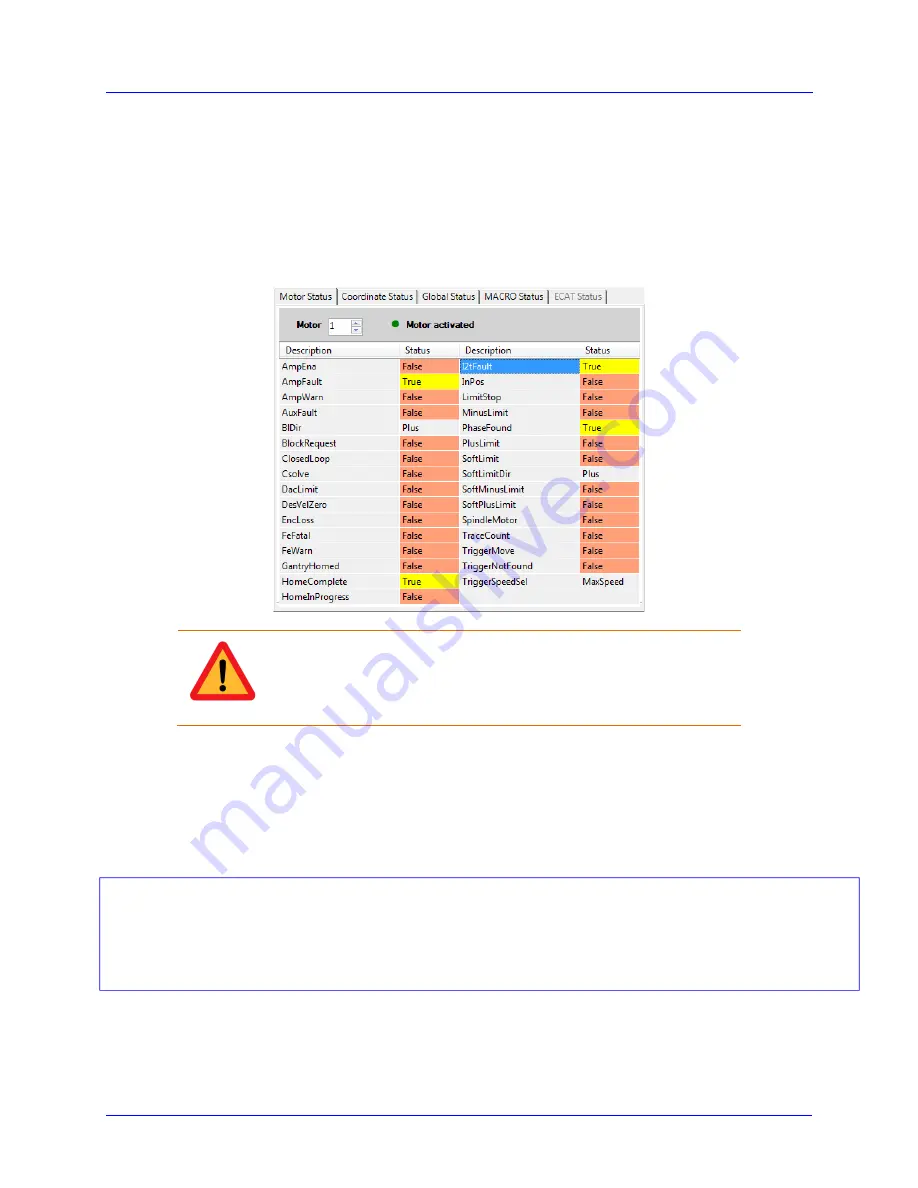
When an I2T fault occurs, the motor is killed, the amplifier fault and I2TFault bits are set (as seen in the
motor status window in the IDE software). These bits can be accessed using the motor structure elements
Motor[
x
].AmpFault
and
Motor[
x
].I2TFault
.
Caution
In all cases of the following equations, the stricter current
specification (lower) between the motor and the amplifier should be
used.
In torque control mode, the result of the position-velocity servo loop is output to the amplifier, typically
through a D/A converter circuit with an output range of ±10V, corresponding to the full numeric range of
± 32,768. This refers to the voltage of the DAC+ output relative to the reference voltage signal AGND
(0V). If you are using the DAC+ and DAC- outputs, the output range is ±20V, and the effective gain of
the output circuitry is 20 / 32,768 (Volts / LSB). So, if the amplifier can only tolerate ±10V, the value of
Motor[].MaxDac should not be greater than 16,384.
GLOBAL
Amp1PeakCur = 25;
// Amplifier 1 Peak Current [A]
GLOBAL
Motor1PeakCur = 20;
// Motor #1 Peak Current [A]
GLOBAL
Motor1ContCur = 10;
// Motor #1 Continuous Current [A]
GLOBAL
Motor1TimeAtPeak = 1;
// Motor #1 Peak Current Time [sec]
-- User Input
-
–
User Input
-- User Input
-- User Input
Motor[
1
].MaxDac = Motor1PeakCur *
32768
/ Amp1PeakCur
Motor[
1
].I2TSet = Motor1ContCur *
32768
/ Amp1PeakCur
Motor[
1
].I2tTrip = (POW(Motor[
1
].MaxDac,
2
) - POW(Motor[
1
].I2TSet,
2
)) * Motor1TimeAtPeak





















































