





























DeviceNet Slave Communication Module IFD9502
DVP-PLC Application Manual
16
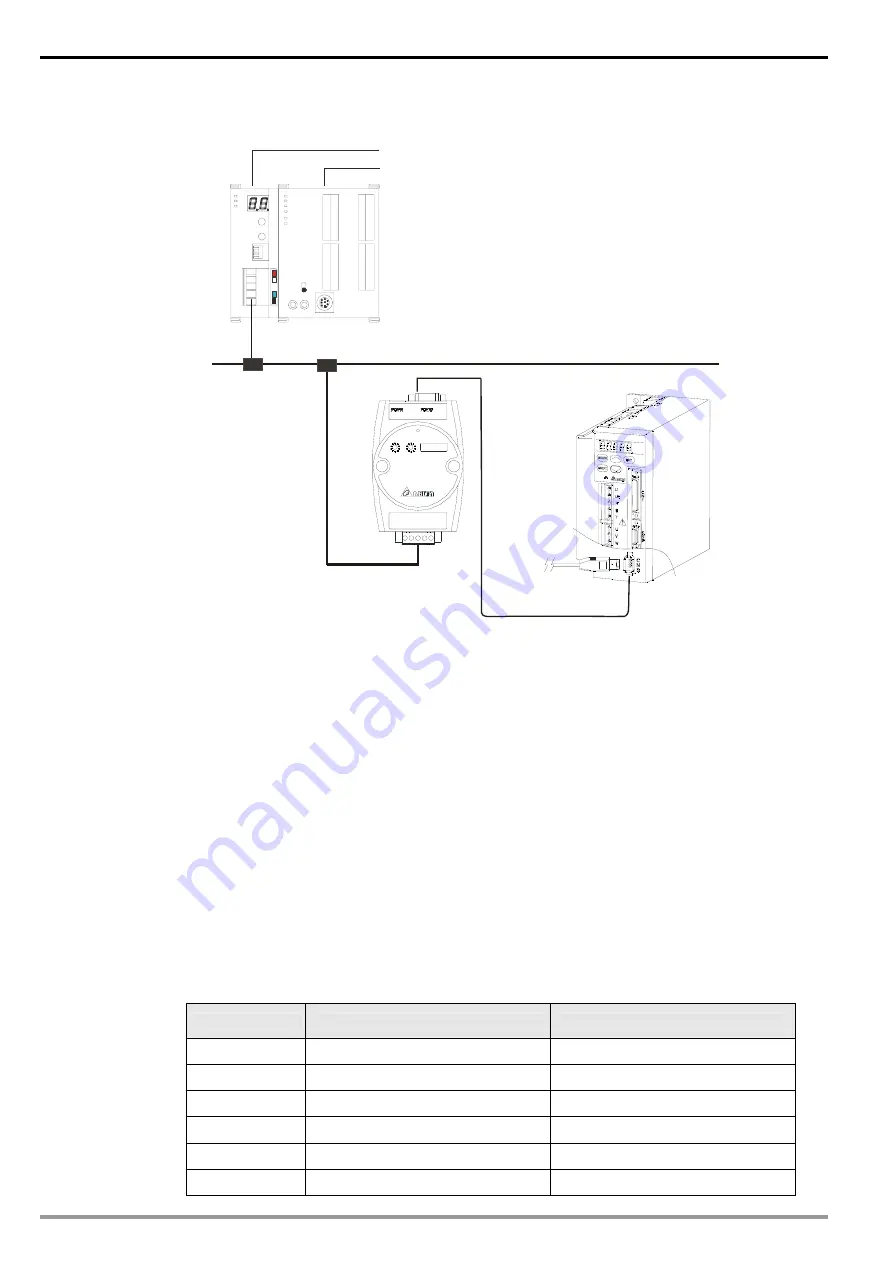
3.4 When IFD9502 is connected to Delta ASD-A series servo drive
DeviceNet
RS-232/RS-485
communication
DVP28SV
DVPDNET-SL
DVPDNET
DVP28SV
RUN
STOP
Master
Delta ASD-A servo drive
1.
Baud rate and the setting of communication format
Before connecting Delta servo drive to bus, set the node address of the servo drive as 01 and the
communication format as 115,200; 7, E, 1; ASCII (the format is fixed; other formats will be invalid).
Assume the equipment connected to IFD9502 is ASDA-A0121LA, you have to configure the following
parameters before connecting the servo drive to IFD9502.
y
P3-00 = H’0001 (set node address to 1)
y
P3-01 = H’0005 (set baud rate to 115,200 bps)
y
P3-02 = H’0001 (set communication format as ASCII,7,E,1)
y
P3-05 = H’0002 (select RS-485 communication)
y
P3-05 = H’0000 (select RS-232 communication)
y
P3-06 = H’00FF (set DI1 ~ DI8 to valid communication control)
2.
Reading and modifying parameters
z
IFD9502 allows you to inquire Delta servo drive by explicit messages. The format of inquiry is
shown in the table below.
Byte position
Data written into servo drive
Data read from servo drive
0
Frag [0]+XID+MAC ID
Frag [0]+XID+MAC ID
1
R/R [0]+Service code [0x10]
R/R [0]+Service code [0x0E]
2
Class ID [0x9A]
Class ID [0x9A]
3
Instance ID LSB
Instance ID LSB
4
Instance ID MSB
Instance ID MSB
5
Attribute ID
Attribute ID







































































