





























1 3 6
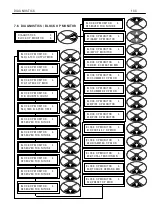
M O T OR DRIV E ALARMS
EN TRY MENU LE V EL 1
M O T OR DRIV E AL ARMS 2
R
M O T OR DRIV E AL ARMS 2
DRIV E TRIP MESS A GE 3
M O T OR DRIV E AL ARMS 2
1 7 1)SPD TRIP EN A BLE
M O T OR DRIV E AL ARMS 2
1 7 5)MISSIN G PULSE EN
M O T OR DRIV E AL ARMS 2
1 7 2)SPEED TRIP T OL
M O T OR DRIV E AL ARMS 2
1 7 3)FLD LO SS TRIP EN
M O T OR DRIV E AL ARMS 2
1 7 4)D OP S C C T TRIP EN
M O T OR DRIV E AL ARMS 2
1 7 7)O V ERSPEED DEL A Y
M O T OR DRIV E AL ARMS 2
1 7 6)REF E X C H TRIP EN
M O T OR DRIV E AL ARMS 2
ST ALL TRIP MENU 3
M O T OR DRIV E AL ARMS 2
1 8 1)A C TIV E TRIP M O N
M O T OR DRIV E AL ARMS 2
1 8 2)S T ORED TRIP M O N
R
R
R
M O T OR DRIV E AL ARMS 2
1 8 3)E X T TRIP RESET
R
8.1 MOTO
R
D
R
I
VE A
L
A
R
MS m
e
nu
PIN number range 1 7 1 to 1 8 3
WA
R
N
I
NG. A
ll
th
e
s
e
a
l
a
r
ms
a
r
e
g
e
n
e
r
a
t
e
d
w
i
th s
e
m
i
c
ondu
c
to
r
e
l
ec
t
r
on
i
c
s.
L
o
ca
l
s
a
f
e
ty
c
od
e
s
m
a
y m
a
nd
a
t
e
e
l
ec
t
r
o-m
ec
h
a
n
i
ca
l
a
l
a
r
m syst
e
ms.
A
ll
a
l
a
r
ms must b
e
t
e
st
e
d
i
n th
e
f
i
n
a
l
a
pp
li
ca
t
i
on
p
ri
o
r
to us
e
. Th
e
m
a
nuf
ac
tu
r
e
r
a
nd supp
li
e
r
s of th
e
PL
/X
a
r
e
not
r
e
spons
i
b
l
e
fo
r
syst
e
m s
a
f
e
ty.
There are 1 6 a
l
arms that cont
i
nuous
l
y mon
i
tor
i
mportant parameters of the motor dr
i
ve system.
1 0 of the a
l
arms are permanent
l
y enab
l
ed and 6 of
the a
l
arms can be enab
l
ed or d
i
sab
l
ed us
i
ng th
i
s
menu. It a
l
so mon
i
tors the a
l
arm status.
If any enab
l
ed a
l
arm
i
s tr
i
ggered
i
t
i
s then
l
atched
caus
i
ng the dr
i
ve to shut do w n and the ma
i
n
contactor to be de-energ
i
sed.
If the a
l
arm has been d
i
sab
l
ed then
i
t w
ill
not be
l
atched and w
ill
not affect the operat
i
on of the
dr
i
ve, a
l
though
i
t can st
ill
be mon
i
tored.
I
f 171
)
S
P
EED T
R
I
P
ENAB
L
E
i
s d
i
s
a
b
l
e
d, th
e
n
a
n
a
utom
a
t
i
c
sw
i
t
c
h to AVF
i
s
i
mp
l
e
m
e
nt
e
d fo
r
t
ac
ho
a
nd/o
r
e
n
c
od
e
r
f
ee
db
ack
.
There are 3 mon
i
tor
i
ng funct
i
ons for a
ll
1 6 a
l
arms.
1) A n act
i
ve mon
i
tor pr
i
or to the
l
atch
2) A mon
i
tor of the
l
atched status of the a
l
arm.
3) A d
i
sp
l
ayed message sho w
i
ng w h
i
ch a
l
arm
caused the dr
i
ve to shut do w n. The d
i
sp
l
ayed
message w
ill
automat
i
ca
ll
y appear w henever the
dr
i
ve
i
s runn
i
ng, and can be removed from the
d
i
sp
l
ay by tapp
i
ng the
l
eft key or start
i
ng the dr
i
ve.
It may be re-exam
i
ned us
i
ng the DRIV E TRIP
MESS A GE menu.
Th
e
m
e
ss
a
g
e
w
ill
b
e
m
e
mo
ri
s
e
d
i
f th
e
c
ont
r
o
l
supp
l
y
i
s
r
e
mov
e
d
.
The PL/X a
l
arms have a de
l
ay t
i
mer assoc
i
ated w
i
th
them such that they on
l
y become
l
atched
i
f the fau
l
t
cond
i
t
i
on pers
i
sts for the w ho
l
e of the de
l
ay per
i
od.
V a
l
ues of th
i
s de
l
ay per
i
od are g
i
ven for the
i
nd
i
v
i
dua
l
a
l
arms. The quoted t
i
mes are typ
i
ca
l
s
i
nce the de
l
ay
i
s
i
mp
l
emented
i
n m
i
croprocessor " cyc
l
e t
i
me " un
i
ts w h
i
ch vary w
i
th m
i
croprocessor
l
oad
i
ng. The arr
i
va
l
of the
a
l
arms pr
i
or to the tr
i
gger can be accessed for advance w arn
i
ng purposes us
i
ng the act
i
ve mon
i
tor w
i
ndo w .
There
i
s a USER AL ARM on h
i
dden PIN 7 1 2. Th
i
s may be connected by the user to any f
l
ag, to tr
i
p the dr
i
ve.
Summary of Contents for PLX
Page 2: ...2 Contents ...
Page 202: ......







































































