





























5-25
●
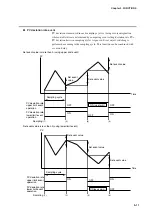
RUN
The RUN mode indicates that the program is run sequentially.
MV output and events operate during PID control, ON-OFF control and other
types of control. In the program RUN mode, program operation progresses
according as time elapses. Note, however, that G.SOAK (guarantee soak) wait,
like the HOLD mode, halts program operation.
●
HOLD
The HOLD mode temporarily halts program operation.
Note, however, that, like the RUN mode, MV output and events operate during
PID operation, ON-OFF control and other types of control. During constant value
control the HOLD mode cannot be invoked.
●
FAST
The FAST mode is essentially a speeded-up version of the RUN mode. The time
factor is selected using variable parameter
PA39
. MV output and events operate
during PID control, ON-OFF control and other types of control. G.SOAK
(guarantee soak) settings are ignored.
During constant value control the FAST mode cannot be invoked.
●
END
The END mode indicates the state of a program that has run its course.
When a program stops at the end, MV output and events operate during PID
control, ON-OFF control and other types of control.
During constant value control the END mode cannot be invoked.
●
READY FAST
The READY FAST mode is a combination of the READY and FAST modes.
MV output, SP output and events operate in the same way as in the READY mode.
Program numbers and segment numbers cannot be selected. Parameters that can
only be changed in the READY mode and memory card operation is not possible
in this mode.
During constant value control the READY FAST mode cannot be invoked.
●
AUTO
The AUTO mode performs automatic operation. MV outputs can be used
depending on
DCP551
control. (Note, however, that when programmer functions
are selected,
DCP551
dependent SP outputs operate.)
●
MANUAL
The MANUAL mode performs manual operation.
The “ ”, “ ”, “
” and “
” console keys can be used to change
communications and MV output.
(Note, however, that when setter functions are selected, communications and SP
output can be changed.)
Chapter 5. FUNCTIONS





















































