





























10 Program Instructions
© Copyright Reserved Autonics Co., Ltd.
65
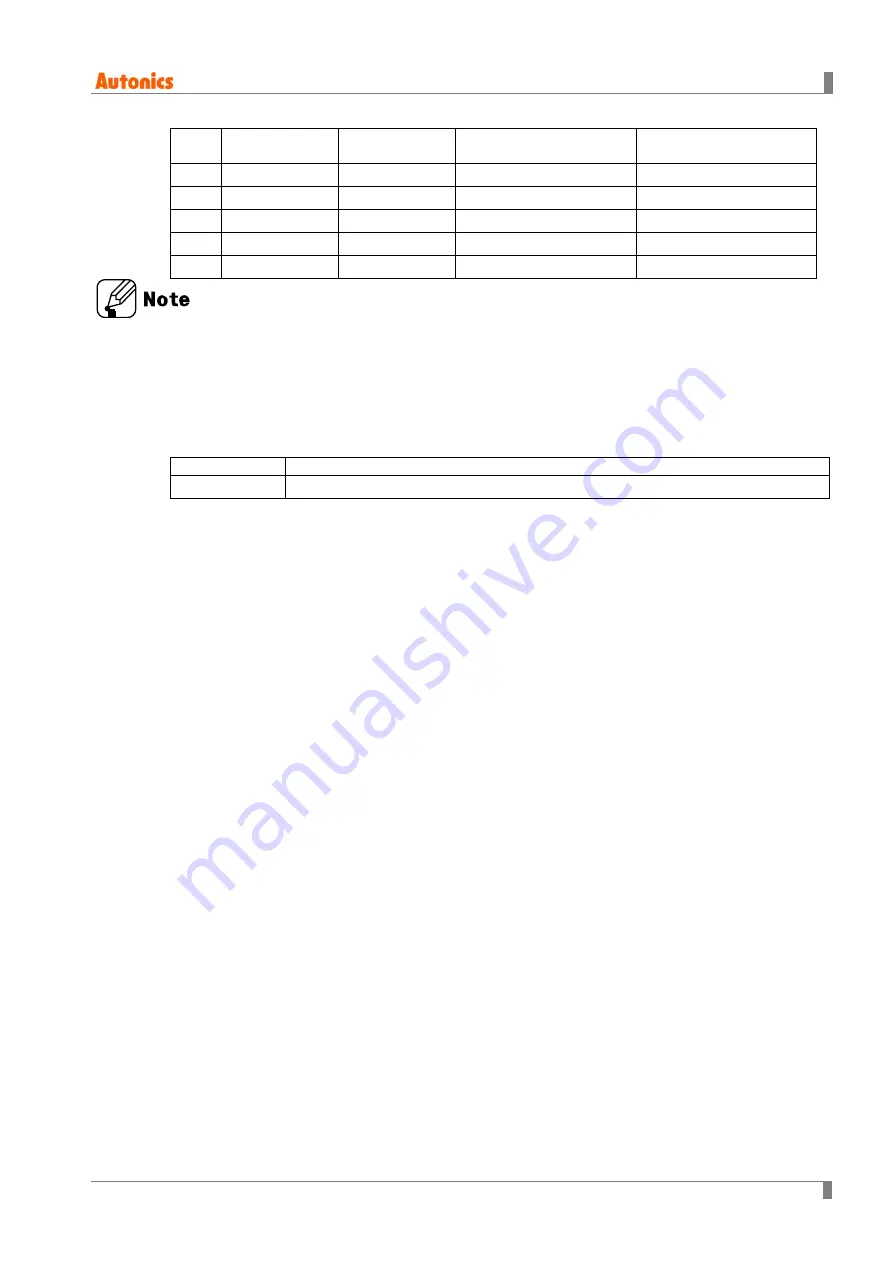
Step
Acceleration
time (ms)
Deceleration
time (ms)
Start drive speed (pps)
Max. drive speed (pps)
1
1,000
0
500
5,000
2
1,000
0
5,000
10,000
3
1,000
0
10,000
20,000
4
0
1,000
7,000
20,000
5
0
1,000
0
7,000
For the step with acceleration, set deceleration time as 0ms.
For the step with deceleration, set acceleration time as 0ms.
10.1.3
HOM (home search)
It is for home search according to the set parameter of Home Search Mode (Home search
mode).
instruction
DATA
HOM
instruction
For more information, refer to the
Summary of Contents for AiC Series
Page 2: ...ii Copyright Reserved Autonics Co Ltd ...
Page 12: ...Table of Contents xii Copyright Reserved Autonics Co Ltd ...
Page 22: ...2 Specifications 22 Copyright Reserved Autonics Co Ltd ...
Page 26: ...3 Dimensions 26 Copyright Reserved Autonics Co Ltd ...
Page 31: ...5 Connection Copyright Reserved Autonics Co Ltd 31 5 Connection ...
Page 32: ...5 Connection 32 Copyright Reserved Autonics Co Ltd ...
Page 34: ...6 Characteristics 34 Copyright Reserved Autonics Co Ltd ...
Page 54: ...8 Control Input Output 54 Copyright Reserved Autonics Co Ltd ...
Page 70: ...10 Program Instructions 70 Copyright Reserved Autonics Co Ltd ...
Page 86: ...11 Driver Function 86 Copyright Reserved Autonics Co Ltd ...







































































