





























Clean Room/ IP54
57.7
1
5
0
1
5
H
9
T
I-I
1
0
1
0
T
14
20h7
3
0
1
5
39
I
I
H
3x90
xx1900001545
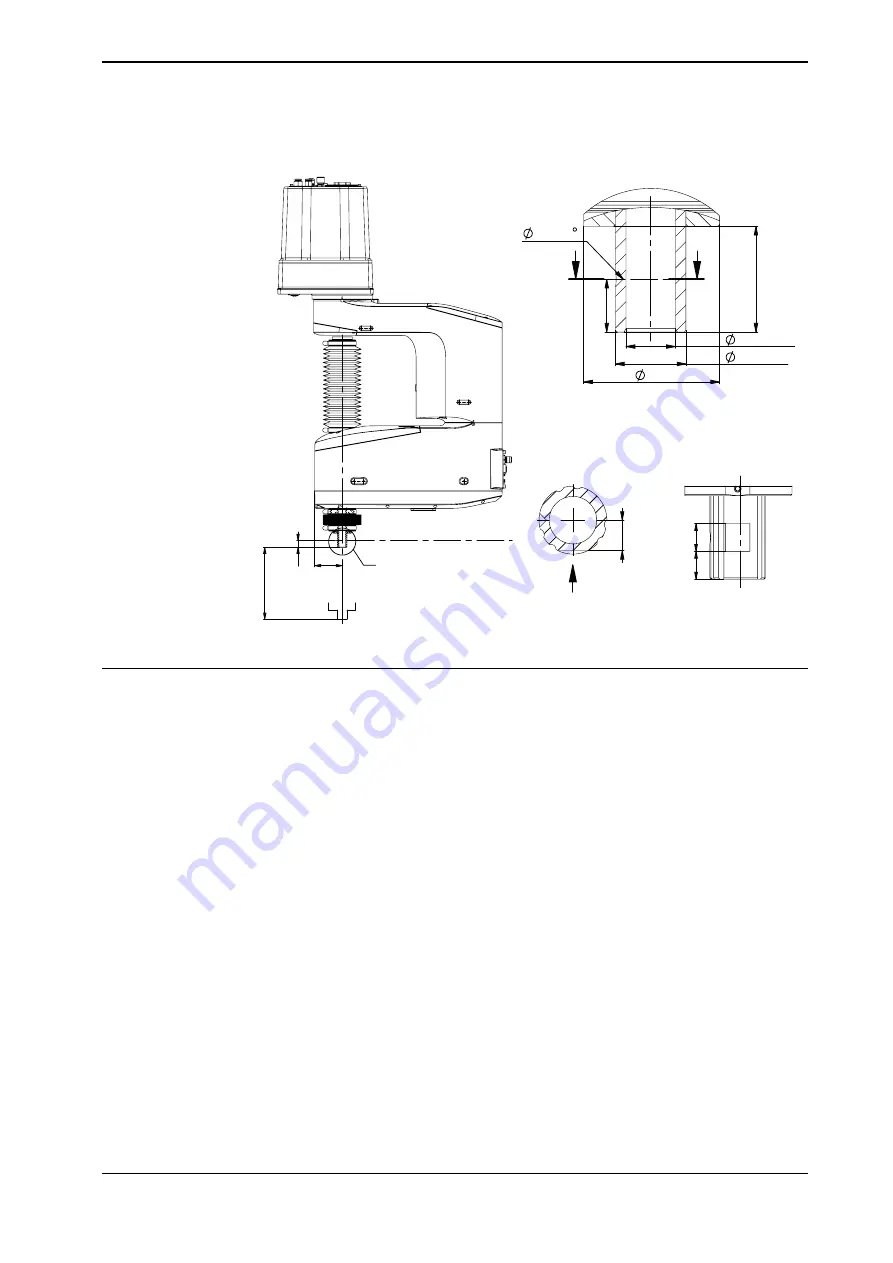
Fastener quality
When fitting tools on the tool flange, only use screws with quality 12.9. For other
equipment use suitable screws and tightening torque for your application.
Product specification - IRB 910INV
33
3HAC068057-001 Revision: M
© Copyright 2019-2023 ABB. All rights reserved.
1 Description
1.5 Mounting of equipment
Continued
Summary of Contents for IRB 910INV
Page 1: ...ROBOTICS Product specification IRB 910INV...
Page 6: ...This page is intentionally left blank...
Page 86: ...This page is intentionally left blank...
Page 88: ......
Page 89: ......







































































