























2.3.3 Assembling the robot IRB 360
Overview
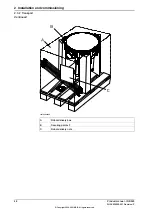
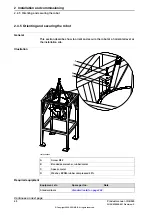
Follow these steps to assemble the robot after unpacking.
Assembling the robot
Note
Action
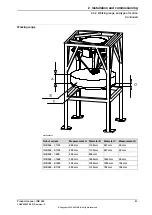
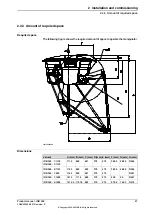
Amount of required space on page 57
Prepare the working site according to
sections:
1
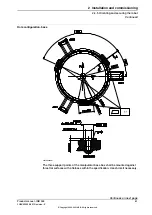
Orienting and securing the robot frame on
page 58
.
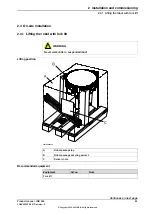
Lifting the robot with fork lift on page 53
Lift the robot according to instructions
in sections:
2
Lifting the robot with roundslings on page 55
.
Pre-installation procedure on page 43
Orienting and securing the robot on page 60
Secure the robot according to section:
3
Replacement of parallel arms on page 167
Assemble the parallel arms according
to section:
4
Replacement of telescopic shaft on page 182
Assemble the telescopic shaft accord-
ing to section:
5
Replacement of movable plate on page 178
Assemble the movable plate according
to section:
6
Robot cabling and connection points on
page 86
.
Connect the controller and the manip-
ulator.
7
CAUTION
Before mounting external equipment on the robot, first read the section
Assembly options
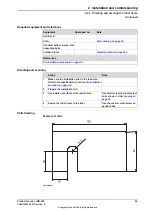
To facilitate cleaning, it is possible to use the spring units without the rubber
bellows, if that is preferred due to hygienic or other reasons.
xx0700000707
Product manual - IRB 360
49
3HAC030005-001 Revision: Z
© Copyright 2008-2021 ABB. All rights reserved.
2 Installation and commissioning
2.3.3 Assembling the robot IRB 360
Summary of Contents for IRB 360
Page 1: ...ROBOTICS Product manual IRB 360 ...
Page 8: ...This page is intentionally left blank ...
Page 266: ...This page is intentionally left blank ...
Page 268: ...This page is intentionally left blank ...
Page 271: ......





















































