


























104
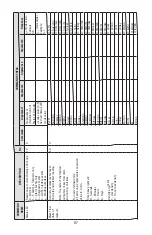
COMMAND
NAME
DESCRIPTION
No.
COMMAND SYNT
AX
Command
Argument 1
Argument 2
Argument 3
Argument 4
Response
V
alve
Control
Sets/Reads Instrument V
alve and PID
parameters settings.
NOTE: Do not change PID Loop T
ype
parameter
. Consult factor
y for more
details regarding PID Loop T
ype.
0 - PD*
1 - PID
2 - PIDD
Submitting V command without
value argument will return current
parameter settings.
V
alve Bias Current and KmP
parameters are bound to the
specifi
c valve. They were set on the
factor
y according to your
hardware to keep best
per
formance. Do not change these
parameters. Consult factor
y
technical support for more info.
29
V
M
Set V
alve Mode
Parameter
.
<V
alue>
C - Closed
A - Auto.
O - Opened
VM:<value>
Example:
VM:A
L
Set V
alve PID loop
type Parameter
.
<value>
[0-2]
0 - Default [PD]
VL<value>
Example: VL:0
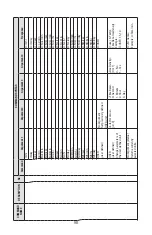
P
V
alve PID terms,
Bias and KmP
coeffi
cient
P
Proportional T
erm
<value>
[0.0 - 5.0]
VPP:<value>
VPP:0.08
I
Integral T
erm
<value>
[0.0 - 5.0]
VPI:<value>
VPI:0.009
D
Derivative T
erm
<value>
[0.0 - 5.0]
VPD:<value>
VPD:0.16
B
V
alve Bias Current
<value>
[0.0 - 0.8]
VPB:<value>
VPB:0.128
M
V
alve KmP
coeffi
cient
<value>
[0.0 - 9.99]
VPM:<value>
VPM:3.125
R
Restore Factor
y
default settings
(consult factor
y)
VPR:0.08,0.009,0.16,
0.128,3.125
Summary of Contents for DPC
Page 6: ...2...
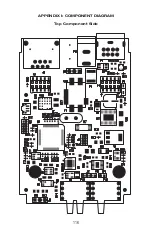
Page 120: ...116 APPENDIX I COMPONENT DIAGRAM Top Component Side...
Page 121: ...117 Bottom Component Side...





















































