



























9
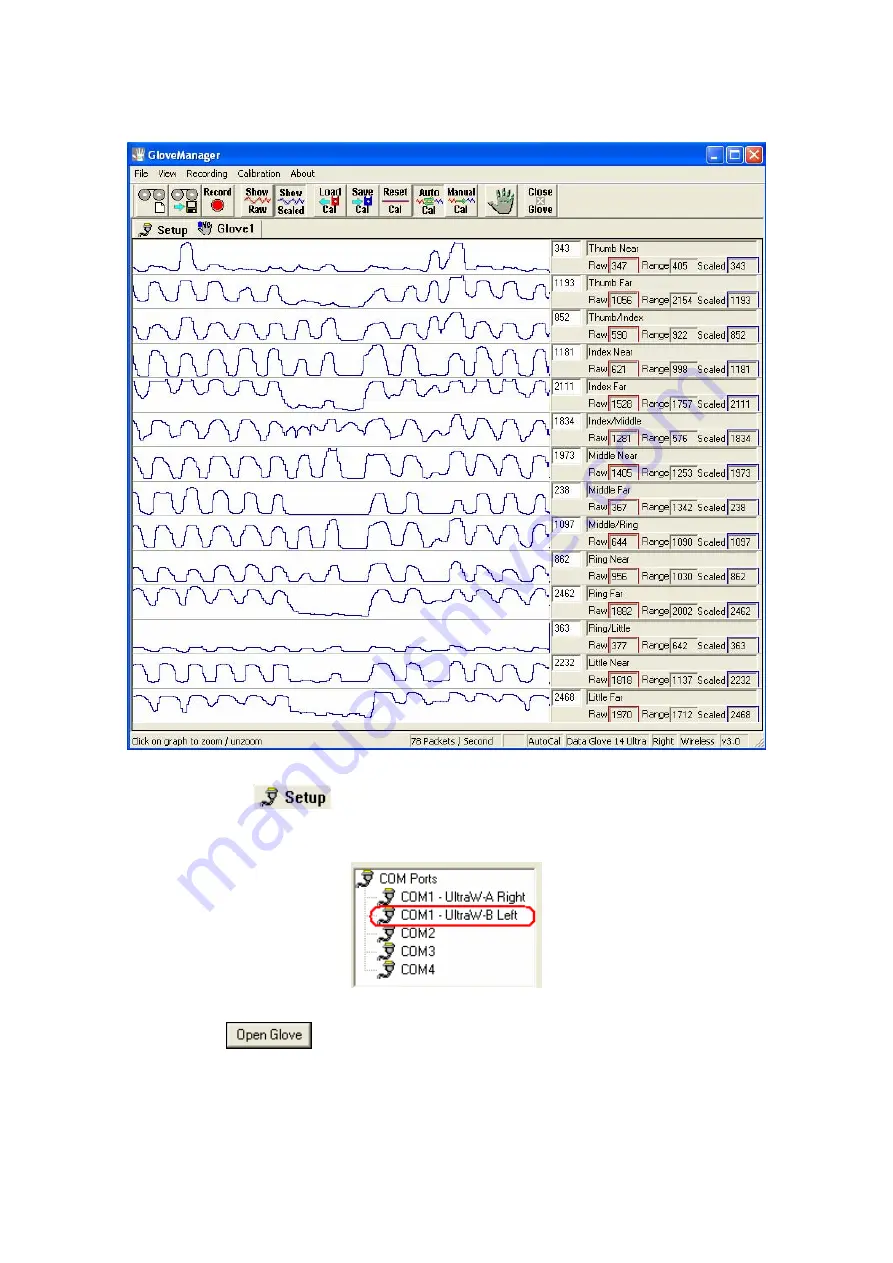
Figure 8 – GloveManager after the First Glove is Successfully Opened
Clicking on the
tab will cause GloveManager to display the setup tab
window again. To open the second wireless glove, select it from the COM port
tree.
Figure 9 – Selecting the Second Glove to be Opened
Click on the
button again to open the second glove. If GloveManager
was successful in opening the second glove, a new glove tab window will
appear.







































































