




















2
2. Setup and Installation
2.1. Package Contents
When first unpacking your glove, please ensure that all the parts are there. If
you are missing anything please contact 5DT or your reseller immediately.
The 5DT Data Glove Ultra consists of the following:
1. 5DT Data Glove Ultra (5 or 14 Sensor)
2. 5DT Data Glove Ultra Series USB cable
3. 5DT Data Glove CD
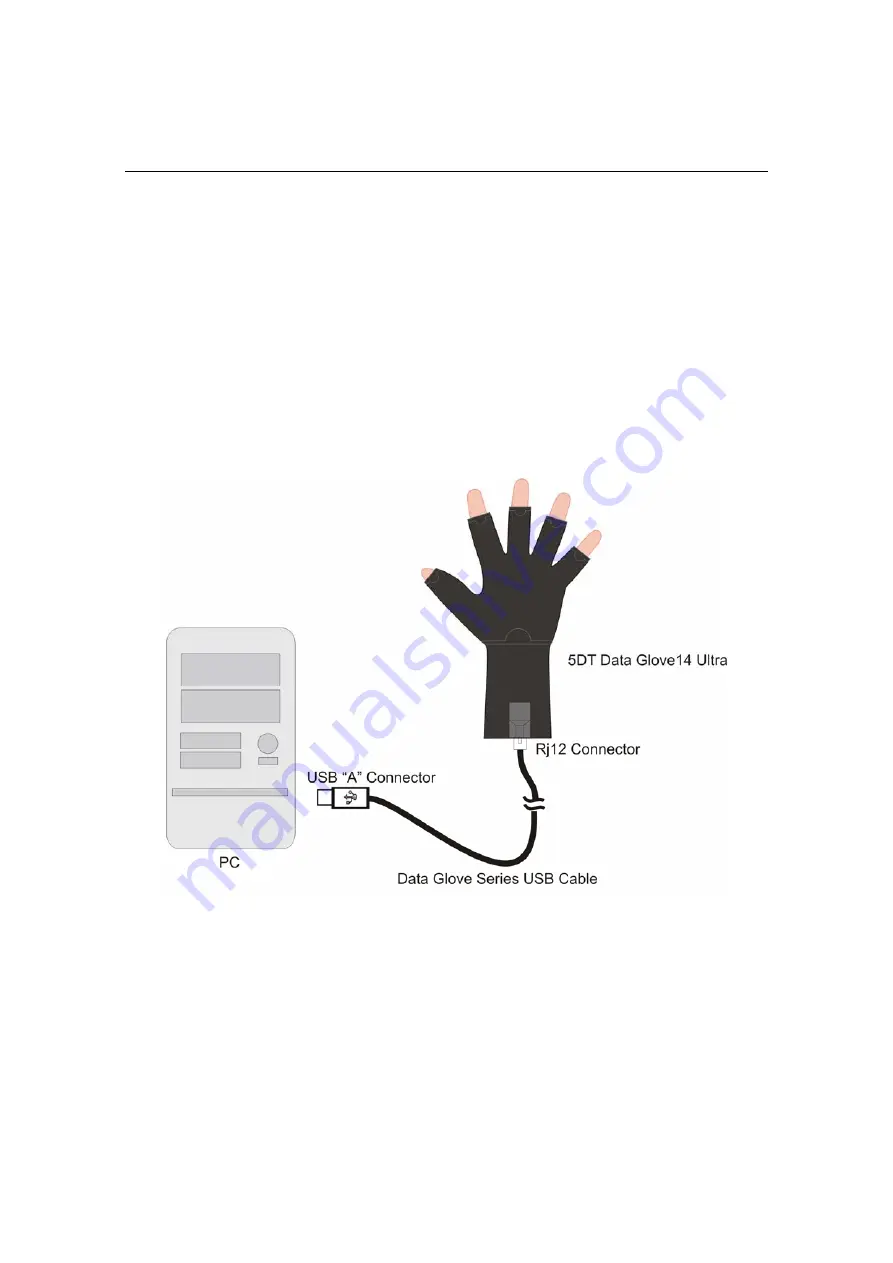
2.2. Connecting the Glove
Connect the glove to the PC as shown in Figure 1.
Figure 1 – Connecting the Glove to the PC.
You can use GloveManager to test the operation of the glove. Detail on this is
given in Section 4 of this manual.