





























9.4 Troubleshooting Malfunction Based on Operation and Conditions of the Servomotor
9-31
9
T
roub
lesho
oti
ng
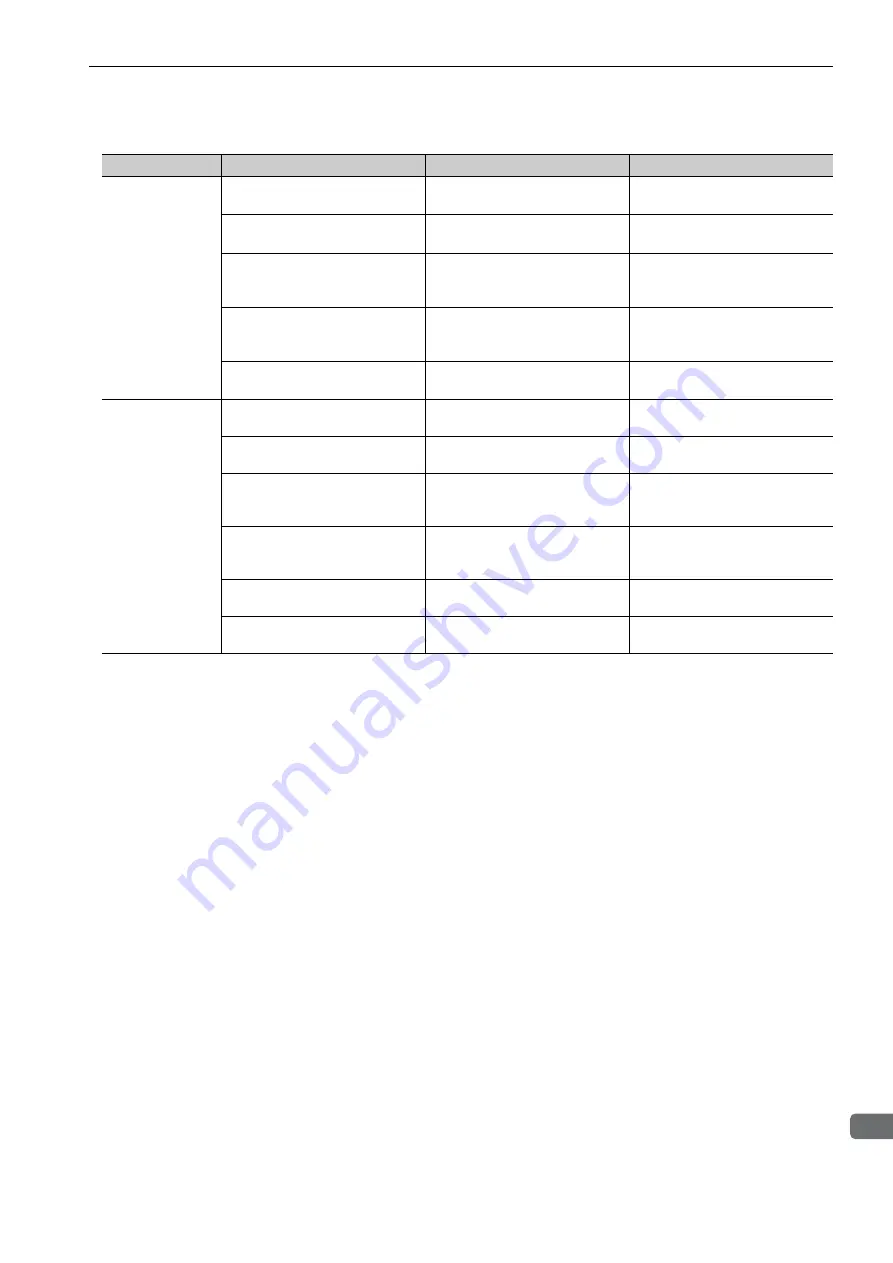
Servomotor Vi-
brates at Fre-
quency of Approx.
200 to 400 Hz.
Unbalanced servo gains
Check to see if the servo gains have
been correctly adjusted.
Execute the advanced autotuning.
Speed loop gain value (Pn100) too
high.
Check the speed loop gain (Pn100).
Factory setting: Kv = 40.0 Hz
Reduce the speed loop gain
(Pn100).
Position loop gain value (Pn102)
too high.
Check the position loop gain
(Pn102).
Factory setting: Kp = 40.0/s
Reduce the position loop gain
(Pn102).
Incorrect speed loop integral time
constant (Pn101)
Check the speed loop integral time
constant (Pn101).
Factory setting: Ti = 20.0 ms
Correct the speed loop integral time
constant (Pn101).
Incorrect moment of inertia ratio
(Pn103)
Check the moment of inertia ratio
(Pn103).
Correct the moment of inertia ratio
(Pn103).
High Motor Speed
Overshoot on
Starting and Stop-
ping
Unbalanced servo gains
Check to see if the servo gains have
been correctly adjusted.
Execute the advanced autotuning.
Speed loop gain value (Pn100) too
high
Check the speed loop gain (Pn100).
Factory setting: Kv = 40.0 Hz
Reduce the speed loop gain
(Pn100).
Position loop gain value (Pn102)
too high
Check the position loop gain
(Pn102).
Factory setting: Kp = 40.0/s
Reduce the position loop gain
(Pn102).
Incorrect speed loop integral time
constant (Pn101)
Check the speed loop integral time
constant (Pn101).
Factory setting: Ti = 20.0 ms
Correct the speed loop integral time
constant (Pn101).
Incorrect moment of inertia ratio
data (Pn103)
Check the moment of inertia ratio
(Pn103).
Correct the moment of inertia ratio
(Pn103).
The torque reference is saturated.
Check the torque reference wave-
form.
Use the mode switch function.
(cont’d)
Problem
Probable Cause
Investigative Actions
Corrective Actions





















































