





























5.5 One-parameter Tuning (Fn203)
5-43
5
Adjustments
5.5.3
One-parameter Tuning Example
This section describes the procedure to adjust the FF LEVEL and FB LEVEL after step 8 of
5.5.2 (1)
Set-
ting the Tuning Mode 2 or 3
and the procedure to save the values after adjustment to the SERVOPACK.
<NOTE>
Positioning time will be shortened if the FF LEVEL is increased. But overshooting and vibrations will occur if
it is increased too much.
Overshooting will be reduced if the FB LEVEL is increased.
Step
Panel Display after Operation or Measurement
Results Display Example
Operation
1
–
Perform steps 1 through 7 of
5.5.2 (1)
Setting the
Tuning Mode 2 or 3
.
2
Measure the positioning time.
If the measurement results and specifications are met,
this concludes the tuning. Go to step 8.
If readjustment is required, go to the next step.
3
First input the reference from the host controller, and
then increase the FF LEVEL with the digital operator
to shorten the positioning time.
Note 1. If the FF LEVEL is changed when the servo-
motor is in operation, this value is not effec-
tive immediately. The changes will be
effective after the servomotor comes to a
stop with no reference input and then the ser-
vomotor starts operation.
2. If the FF LEVEL is changed too much
during operation, vibration may occur
because the responsiveness changes rapidly
when the settings become effective.
3. If large vibrations occur, the SERVOPACK
will automatically detect the vibration fre-
quencies and set the notch filters or anti-res-
onance control. When a notch filter is set,
“NF1” and “NF2” are displayed on the bot-
tom row of the digital operator. When anti-
resonance control is set, “ARES” is dis-
played on the bottom row of the digital oper-
ator.
<NOTE>
• Move the digit with the
or
Key and
increase or decrease the value with the
or
Key.
• The message “FF LEVEL” flashes until the SER-
VOPACK reaches the effective FF LEVEL. If the
servomotor does not stop within approximately 10
seconds after changing the setting, a timeout will
occur. The setting will be returned to the previous
value.
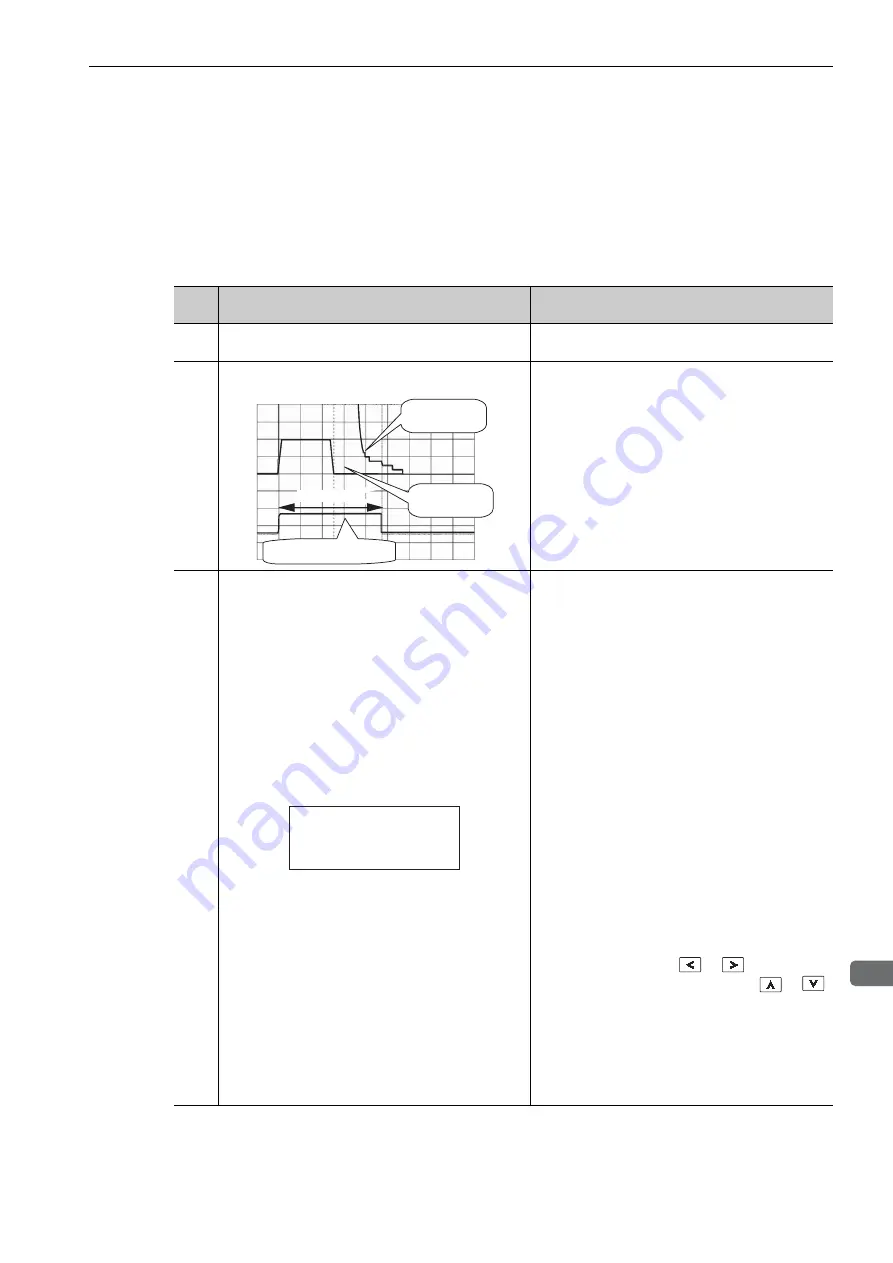
Positioning completion signal
Position deviation
Reference speed
Positioning time
㧾㨁㧺ޓ ̆㧻㨚㨑㧼㨞㨙㨀㨡㨚̆
㧲㧲ޓ㧸㧱㨂㧱㧸㧩㧜㧜㧡㧜㧚㧜
㧲㧮ޓ㧸㧱㨂㧱㧸㧩㧜㧜㧠㧜㧚㧜