





























8.13 Manual Tuning
8.13.2 Compatible Adjustment Functions
8-87
8
T
uning
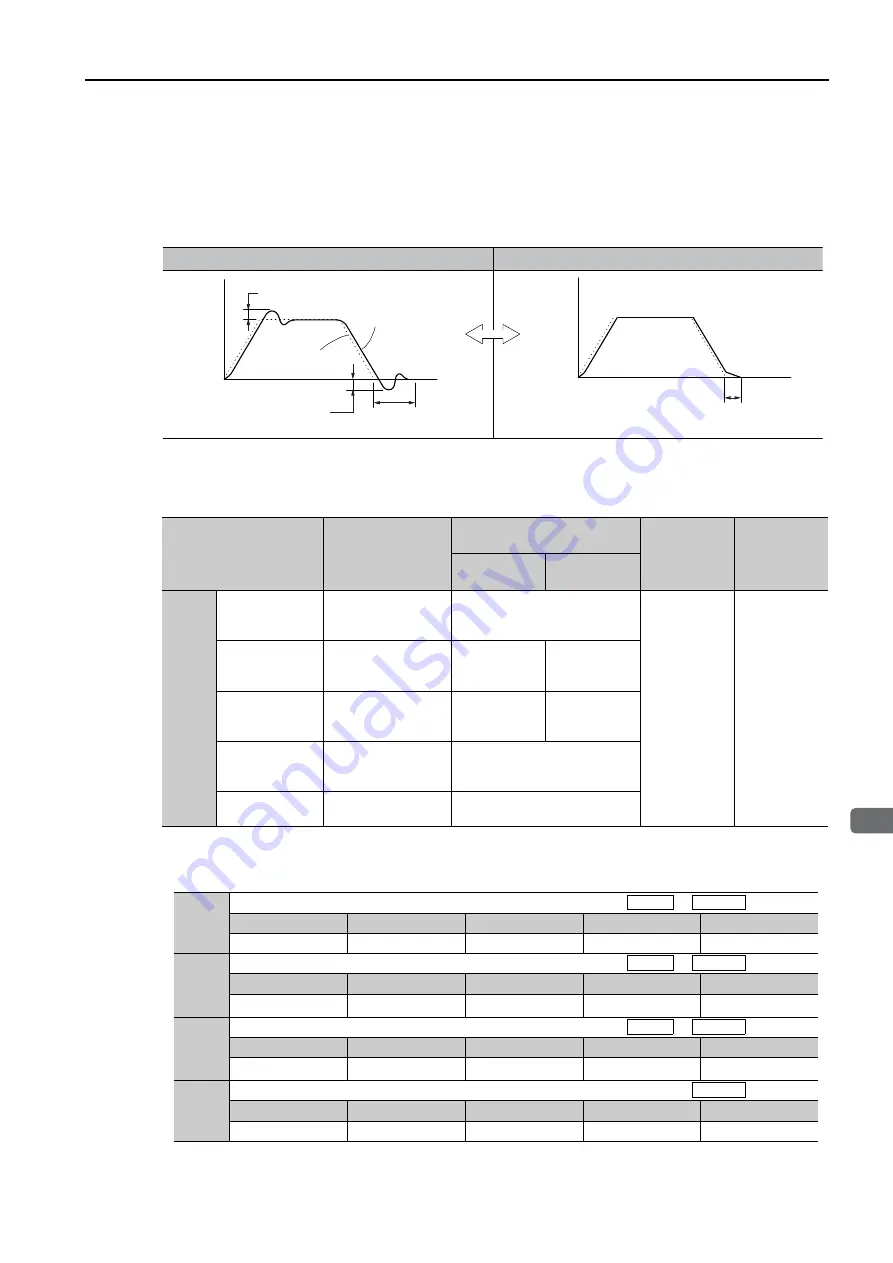
Mode Switching (Changing between Proportional and PI
Control)
You can use mode switching to automatically change between proportional control and PI con-
trol.
Overshooting caused by acceleration and deceleration can be suppressed and the settling time
can be reduced by setting the switching condition and switching levels.
Related Parameters
Select the switching condition for mode switching with Pn10B = n.
X.
Parameters That Set the Switching Levels
•
Rotary Servomotors
Parameter
Mode Switching
Selection
Parameter That Sets the
Level
When
Enabled
Classification
Rotary
Servomotor
Linear
Servomotor
Pn10B
(210B
hex)
n.
0
(default setting)
Use the internal
torque reference as
the condition.
Pn10C (210C hex)
Immediately
Setup
n.
1
Use the speed ref-
erence as the con-
dition.
Pn10D
(210D hex)
Pn181
(2181 hex)
n.
2
Use the accelera-
tion reference as
the condition.
Pn10E
(210E hex)
Pn182
(2182 hex)
n.
3
Use the position
deviation as the
condition.
Pn10F (210F hex)
n.
4
Do not use mode
switching.
−
Pn10C
(210C
hex)
Mode Switching Level for Torque Reference
Setting Range
Setting Unit
Default Setting
When Enabled
Classification
0 to 800
1%
200
Immediately
Tuning
Pn10D
(210D
hex)
Mode Switching Level for Speed Reference
Setting Range
Setting Unit
Default Setting
When Enabled
Classification
0 to 10,000
1 min
-1
0
Immediately
Tuning
Pn10E
(210E
hex)
Mode Switching Level for Acceleration
Setting Range
Setting Unit
Default Setting
When Enabled
Classification
0 to 30,000
1 min
-1
/s
0
Immediately
Tuning
Pn10F
(210F
hex)
Mode Switching Level for Position Deviation
Setting Range
Setting Unit
Default Setting
When Enabled
Classification
0 to 10,000
1 reference unit
0
Immediately
Tuning
Without Mode Switching
With Mode Switching
Motor
speed
Overshooting
Actual Servomotor
operation
Reference
Time
Settling time
Overshooting
Motor
speed
Settling time
Time
Speed
Position
Speed
Position
Speed
Position
Position







































































