



























B-37
166006-1CD
166006-1CD
Appendix B
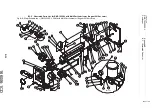
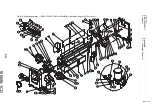
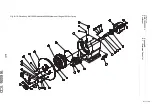
B.1 Illustrated Parts List
RM2-755/1255SL
Positioner
Table B
-
12: Tailstock Swing Arm Assembly
ITEM NO.
PART NO.
DESCRIPTION
Qty
163900-1
Tailstock Swing Arm Assembly
1
163840-1
HOUSING,TAILSTOCK SWINGARM
1
2
164890-1
HOUSING ASSY, TAILSTOCK ADAPTER, MOTOMOUNT
2
4
165038-1
SHAFT, BEARING, TAILSTOCK SWINGARM
1
5
163886-1
BEARING,SPHERICAL,PILLOW BLOCK,2.437 ID
1
6
157188-1
RETAINER, TAILSTOCK SWINGARM
1
7
132619-3
SCREW, FHSC, M8x1.25 X 20
1
8
130532-2
SCREW, SHC, M16 X 35,CLASS12.9
8
9
132049-1
WASHER, CONICAL SPRING, GTS16
8
10
479297-5
SCREW, SHC, M10x1.5 X 30, CLASS 12.9
12
11
470541-1
WASHER, CONICAL SPRING, GTS10
12
12
137298-2
SCREW, SHOULDER, 1/2” DIA X 2 1/2” LG X 3/8”-16 THD
2
13
152712-1
WASHER, BELLEVILLE, .505" ID X 1" OD
30
14
130441-7
NUT, HEX, 3/8
2
117 of 145
























































