





























48
9.3.Joint Motion
The robotic arm consists of joint modules. The position of the end-effector is controlled by
coordinating the rotation angle of each joint.
The joint motion reach the target point with the fastest path, the end trajectory is not a
straight line, and the speed unit is ° /s. After the target point is set, the corresponding poses
are unique both in the end path and the trajectory process.
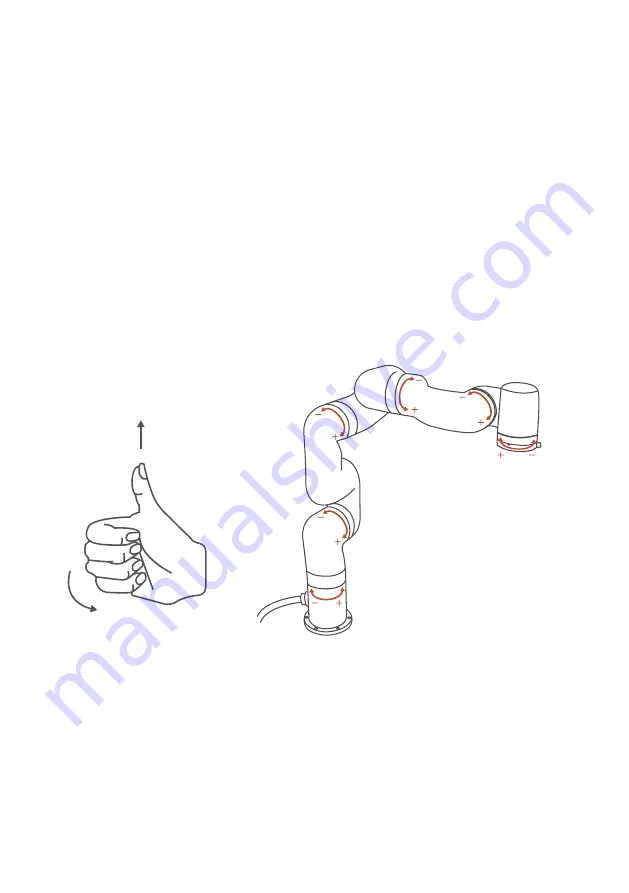
9.3.1.Joint Rotating Direction
To confirm the direction of joint rotation, the following method can be followed: hold the
right hand, the thumb points to the next joint direction, the other four fingers point to the
positive direction value and vice versa. When setting the joint value, ± indicates the joint
rotating direction.
9.3.2.Joint Range
There are two joint rotating unit s: radians (rad) and degree ( ° ). When using the SDK, the
unit to be used should be clearly defined. The figure below shown the maximum value of
each joint in the rotating direction (±). In fact, the joint rotation will approach the maxi-
mum value infinitely. When the stated value is equal to the maximum value, the error
reporting mechanism of the robotic arm may be invoked.