





























83
【
WallDown (90 °, 0 °)
】
●
Indicates that the robotic arm is wall-mounted and the end of the robotic arm is
facing down.
【
Customized
】
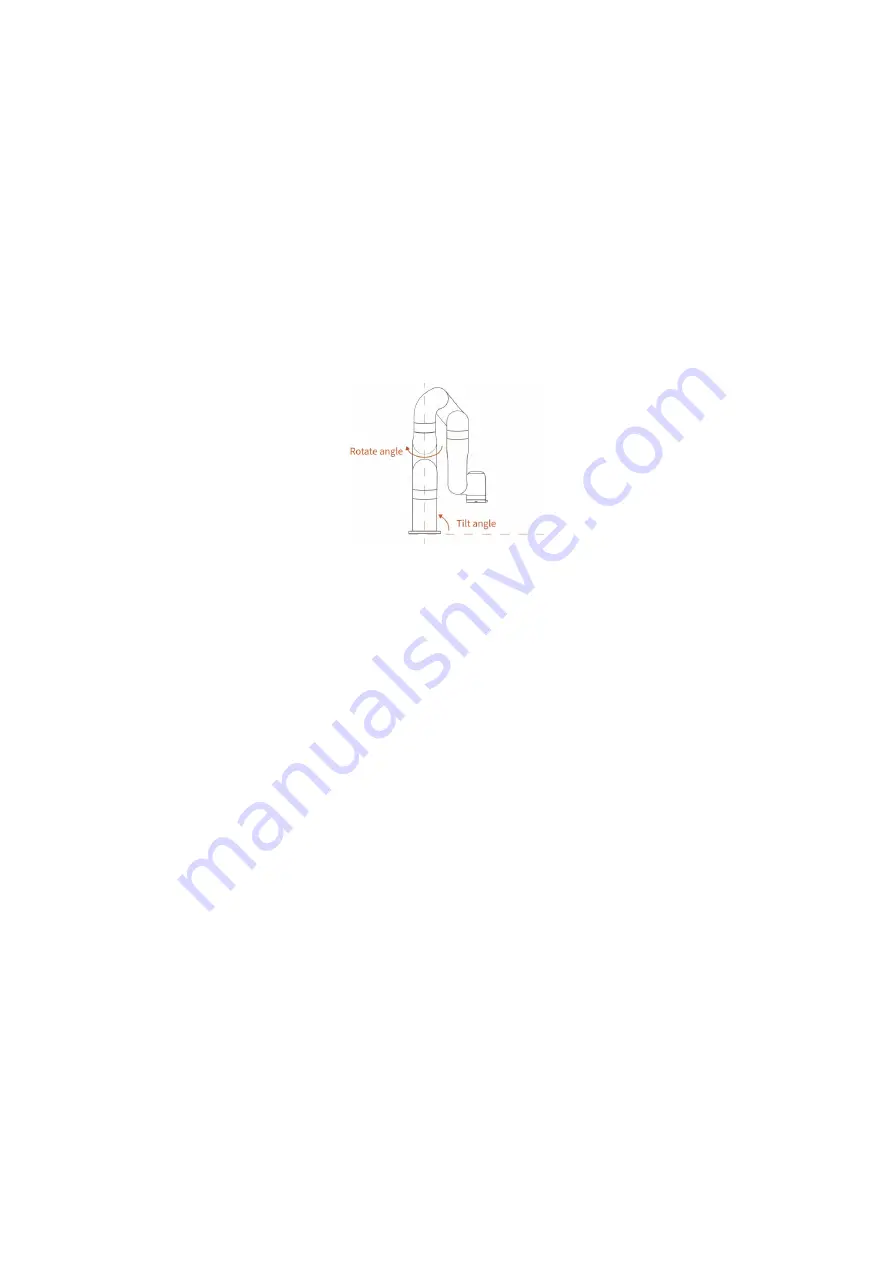
● Mount at other angles. For mounting at a certain angle. It is necessary to set the tilt
angle and the rotation angle according to the actual situation.
How to determine the tilt angle and rotation angle?
The initial position of the robotic arm:
● On the horizontal plane, when the user is facing the robotic arm side, the initial
position is on the left-hand side of the user in a downward direction.
Tilt angle:
The initial position of the robotic arm and the base of the robotic arm to be
mounted should be in a tilt angle, which ranges from 0 to 180°.
Rotation angle:
The initial position of the robotic arm and the end direction of the
robotic arm to be mounted should be used as the rotation angle.
The method of determining the rotation angle ± direction:
Hold it with your right hand and point your thumb in the direction of the robotic arm
which is vertically mounted. The direction where your four fingers point is the
positive direction and vice versa.
The range of rotation angle : ±180
°
Содержание xArm 5
Страница 1: ...1 ...
Страница 60: ...60 Step1 Open the Network and Sharing Center Step2 Open the Ethernet Step3 Open the Properties ...
Страница 63: ...63 1 2 4 Return to the Search Interface PC Click Tool Search to return to the search interface ...
Страница 68: ...68 Confirm Save the changes Cancel Cancel the changes ...
Страница 139: ...139 Delete the file Import Project Import recorded trajectory Download All Download all current files ...
Страница 173: ...173 Robot Joints Robot Zero Attitude Joint Rotating Direction ...




































































