


























170
Quiescent Power (Minimum Power Consumption)
1.5W
Peak Current
1.5A
Working Range
86mm
Maximum Clamping Force
30N
Weight (g)
822g
Communication Mode
RS-485
Communication Protocol
Modbus RTU
Programmable Gripping Parameters
Position, Speed
Feedback
Position
Vacuum Gripper
Rated Supply Voltage
24V DC
Absolute Maximum Supply Voltage
28V DC
Quiescent Current(mA)
30mA
Peak Current(mA)
400mA
Vacuum
78%
Vacuum Flow (L/min)
> 5.6L/min
Weight (g)
610 g
Dimensions (L*W*H)
122.5 * 91.6 * 75mm
Payload (kg)
≤5kg
Noise Level (30cm away)
< 60dB
Communication Mode
Digital IO
State Indicator
Power, Working State
Feedback
Air Pressure (Low or Normal)
Notes:
1. The ambient temperature of xArm is 0-50 °C, please reduce the temperature if continuous
high-speed
operation is needed.
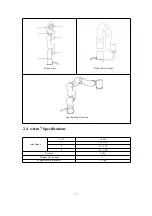
2.2 xArm 5 Specifications
Joint Range
1,5
±360°
2
-118°~120°
3
-225°~11°
4
-97°~180°
Payload
3kg
Degrees of Freedom
5
Weight(robotic arm only)
11.2kg
Содержание xArm 5
Страница 1: ...1 ...
Страница 60: ...60 Step1 Open the Network and Sharing Center Step2 Open the Ethernet Step3 Open the Properties ...
Страница 63: ...63 1 2 4 Return to the Search Interface PC Click Tool Search to return to the search interface ...
Страница 68: ...68 Confirm Save the changes Cancel Cancel the changes ...
Страница 139: ...139 Delete the file Import Project Import recorded trajectory Download All Download all current files ...
Страница 173: ...173 Robot Joints Robot Zero Attitude Joint Rotating Direction ...

































































