





























29
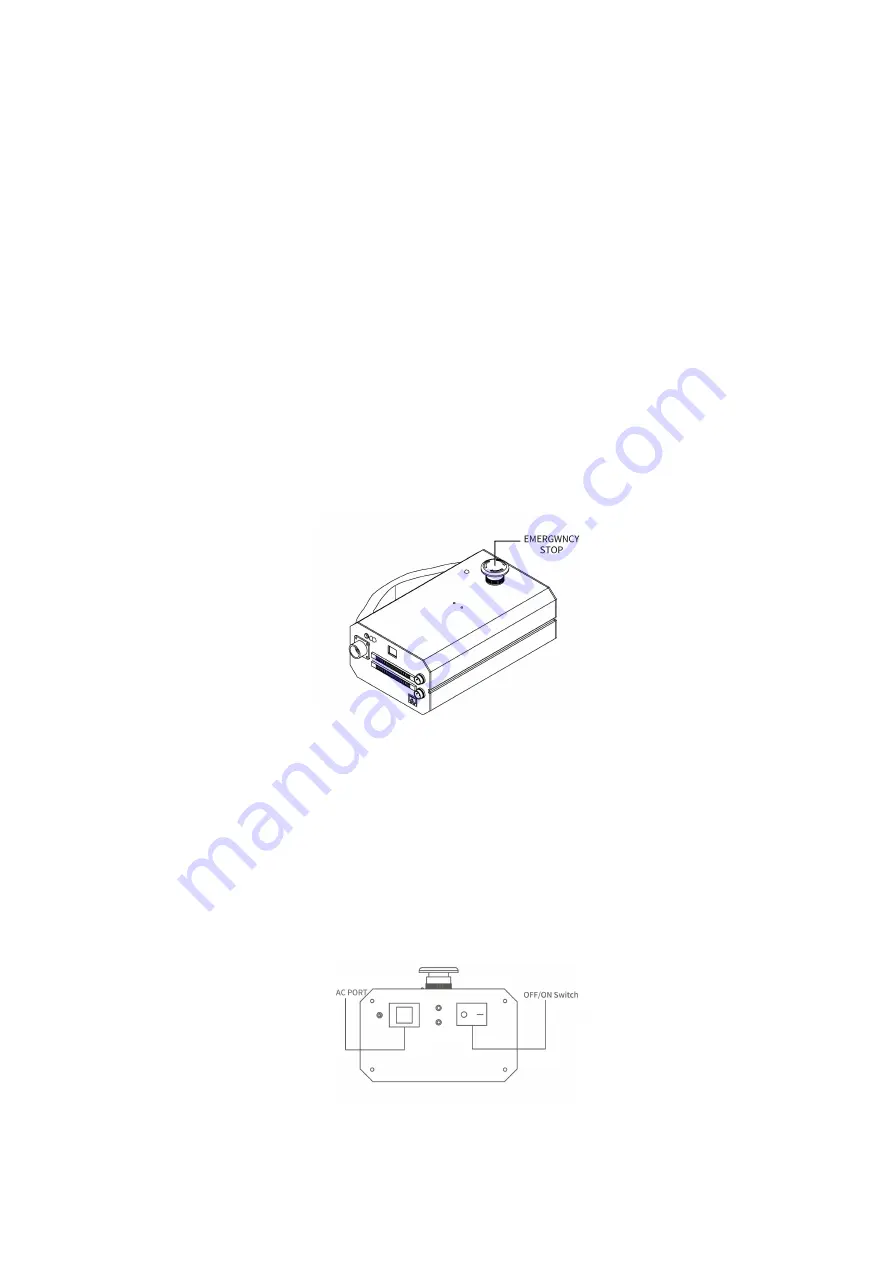
1. Turn on the OFF/ON button and ensure the indicator lights are lit.
2. Press the power button, when the status indicator
(
CONTROLLER
)
lights up,
the control box is turned on.
3. Rotate the emergency stop button in the direction indicated by the arrow and is
pulled up, at which point the xArm power indicator
(
ROBOT PWR
)
lights up.
4. Use the xArm Studio / SDK command to complete the operation of enabling the
robotic arm. (enable the servo motor)
1.3.3. Shut Down the Robotic Arm System
1. Shutdown Sequence
(1) Press the EMERGENCY STOP button to power off the robotic arm.
(2) Ensure the power indicator light is off.
2. Shutdown the control box
(1) Press the power button
(
PWR
)
of the control box for about 5s to turn off
the status light.
(2) Turn off the power supply of the control box. (the power switch takes about 5
seconds to turn off the power of the control box. If users like to restart the
power right after turning off the power supply, they need to press the power
button manually.)
Содержание xArm 5
Страница 1: ...1 ...
Страница 60: ...60 Step1 Open the Network and Sharing Center Step2 Open the Ethernet Step3 Open the Properties ...
Страница 63: ...63 1 2 4 Return to the Search Interface PC Click Tool Search to return to the search interface ...
Страница 68: ...68 Confirm Save the changes Cancel Cancel the changes ...
Страница 139: ...139 Delete the file Import Project Import recorded trajectory Download All Download all current files ...
Страница 173: ...173 Robot Joints Robot Zero Attitude Joint Rotating Direction ...