


























STE 73995
– 34 –
TRANSPORTATION AND INSTALLATION MANUAL
2.5 Safety
Measures
a)
When installing the robot, provide sufficient space to carry out the work safely.
b)
Clarify the hazard zone, and provide a safety fence so that other persons cannot
enter the zone easily. The hazard zone is the zone near the robot's working
space where a hazardous state could occur if a person enters.
c)
Provide a limit switch, photo switch or foot switch, etc., at the entrance of the
safety fence to provide an emergency stop function that will stop the robot if a
person enters the hazard zone. The emergency stop function should be an
electrically independent close contact (closed in normal operation) with
compulsive opening function and must not be automatically recovered.
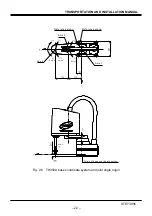
Fig. 2.17 Example of safety measures
d)
The controller should be installed at a place outside the hazard zone where the
operator can view the robot movement.
Robot
Line
Line
Door
Limit switch
Controller
Photo
switches
Foot switch
Safety
fence
Revolving
flash light
Door
Limit switch
Foot switch
Photo switches
Safety
fence
Revolving
flash light
Robot moving area
Содержание TH180
Страница 10: ...STE 73995 9 TRANSPORTATION AND INSTALLATION MANUAL Fig 1 1 Robot package TH250A Fig 1 2 Robot package TH350A ...
Страница 11: ...STE 73995 10 TRANSPORTATION AND INSTALLATION MANUAL Fig 1 3 Robot package TH180 ...
Страница 21: ...STE 73995 20 TRANSPORTATION AND INSTALLATION MANUAL Fig 2 4 External view of TH350A T robot ...
Страница 43: ...STE 73995 42 TRANSPORTATION AND INSTALLATION MANUAL Fig 3 4 Robot side connector arrangement TH350A T ...
Страница 80: ...STE 73995 79 TRANSPORTATION AND INSTALLATION MANUAL APPROVED BY CHECKED BY PREPARED BY ...







































































