




























Step Data Setting
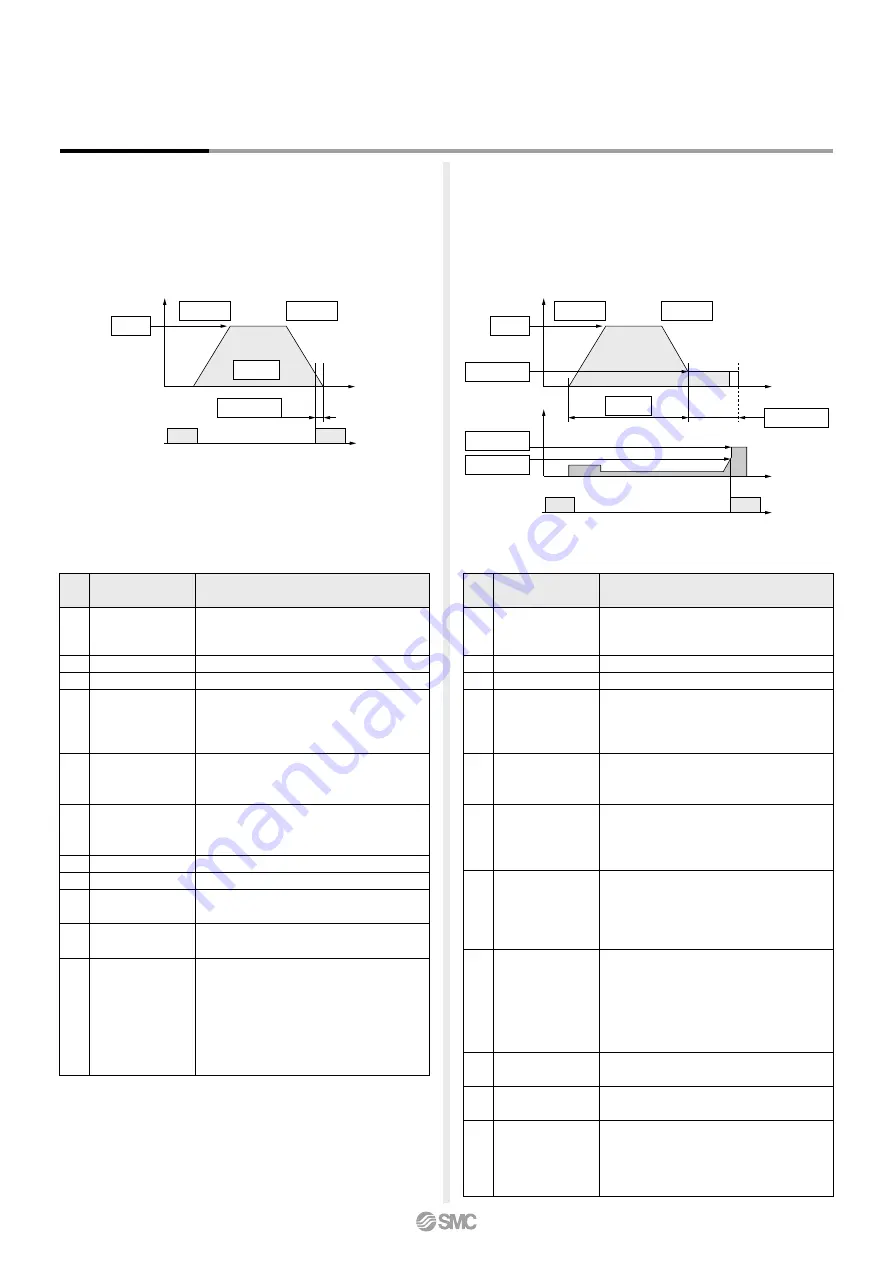
1. Step data setting for positioning
Step Data (Positioning)
2. Step data setting for pushing
In this setting, the actuator moves toward and stops at the
target position.
The following diagram shows the setting items and operation.
The setting items and set values for this operation are stated
below.
The actuator moves toward the pushing start position, and
when it reaches that position, it starts pushing with the set
force or less.
The following diagram shows the setting items and operation.
The setting items and set values for this operation are stated
below.
: Need to be set.
: Need to be adjusted as required.
—: Setting is not required.
Step Data (Pushing)
: Need to be set.
: Need to be adjusted as required.
Speed
Speed
INP output
OFF
In position
Acceleration
Deceleration
ON
ON
Position
Speed
Speed
Pushing speed
Pushing force
Force
Trigger LV
INP output
OFF
In position
Position
Acceleration
Deceleration
ON
ON
Necessity
Item
Details
Movement MOD
When the absolute position is required, set
Absolute. When the relative position is
required, set Relative.
Speed
Transfer speed to the pushing start position
Position
Pushing start position
Acceleration
Parameter which defines how rapidly the
actuator reaches the speed set. The
higher the set value, the faster it reaches
the speed set.
Deceleration
Parameter which defines how rapidly the
actuator comes to stop. The higher the set
value, the quicker it stops.
Pushing force
Pushing force ratio is defined.
The setting range differs depending on the
electric actuator type. Refer to the
operation manual for the electric actuator.
Trigger LV
Condition that turns on the INP output
signal. The INP output signal turns on
when the generated force exceeds the
value. Trigger level should be the pushing
force or less.
Pushing speed
Pushing speed during pushing.
When the speed is set fast, the electric
actuator and workpieces might be
damaged due to the impact when they hit
the end, so this set value should be
smaller. Refer to the operation manual for
the electric actuator.
Moving force
Max. torque during the positioning operation
(No specific change is required.)
Area 1, Area 2
Condition that turns on the AREA output
signal.
In position
Transfer distance during pushing. If the
transferred distance exceeds the setting, it
stops even if it is not pushing. If the
transfer distance is exceeded, the INP
output signal will not turn on.
Necessity
Item
Details
Movement MOD
When the absolute position is required, set
Absolute. When the relative position is
required, set Relative.
Speed
Transfer speed to the target position
Position
Target position
Acceleration
Parameter which defines how rapidly the
actuator reaches the speed set. The
higher the set value, the faster it reaches
the speed set.
Deceleration
Parameter which defines how rapidly the
actuator comes to stop. The higher the set
value, the quicker it stops.
Pushing force
Set 0.
(If values 1 to 100 are set, the operation
will be changed to the pushing operation.)
—
Trigger LV
Setting is not required.
—
Pushing speed
Setting is not required.
Moving force
Max. torque during the positioning operation
(No specific change is required.)
Area 1, Area 2
Condition that turns on the AREA output
signal.
In position
Condition that turns on the INP output
signal. When the actuator enters the range
of [in position], the INP output signal turns
on. (It is unnecessary to change this from
the initial value.) When it is necessary to
output the arrival signal before the
operation is completed, make the value
larger.
33
JXC5H/6H
Series





















































