





















-40-
8. Actuator operation from host
8.1 CiA 402 drive profile
In LECSN-T, each network conforms to the CiA402 drive profile.
The CiA402 drive profile is a device profile for drive and motion control and mainly defines the
functional operation of drivers for servo motors.
This section shows how to operate in accordance with the CiA402 drive profile.
8.1.1
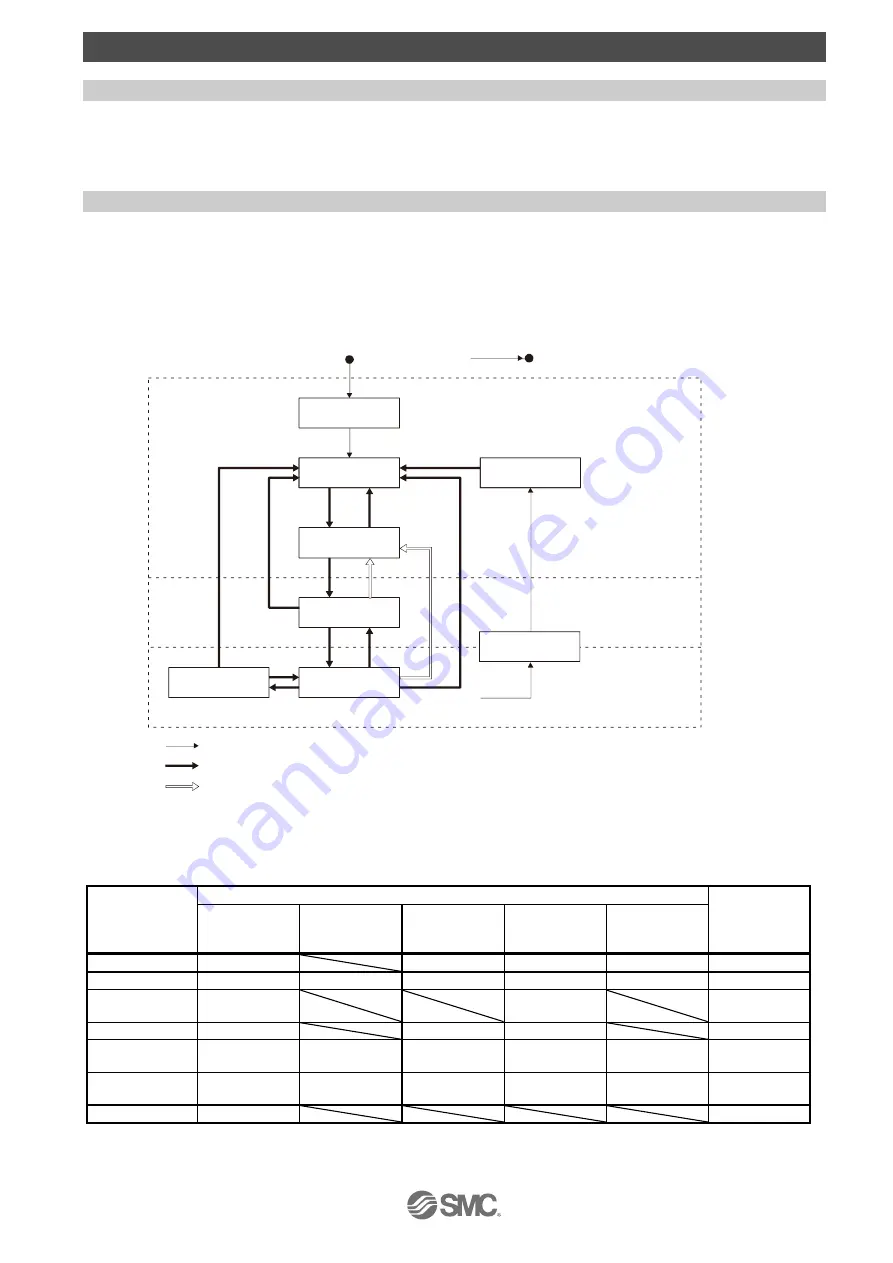
FSA state
The inside state of the driver is controlled based on the FSA state, defined in the CiA 402 drive profile
standard. The transition conditions between the FSA states are shown in the figure below.
The states are switched when the master sends a command.
When the state has transitioned from “Not
ready to switch on”, which is right after the power on, to “Operation enabled” with the predetermined
procedure, the servo motor becomes ready to operate. For details, refer to “LESCN-T Operation Manual
Section 18.5”.
FSA state transition command is sent by setting Bit0-3 and Bit7 of Controlword (6040h).
The FSA state is notified in Bit0-3, Bit5, and Bit6 of the Statusword (6041h).
The following table lists the commands issued to the driver. Turn on the bits according to the command.
Command
Command bit setting of Controlword
Transition No.
Bit 7
Fault Reset
Bit 3
Enable
Operation
Bit 2
Quick Stop
Bit 1
Enable
Voltage
Bit 0
Switch On
Shutdown
0
1
1
0
(2)/(6)/(8)
Switch On
0
0
1
1
1
(3)
Disable Voltage
0
0
(7)/(9)/(10)/(1
2)
Quick Stop
0
0
1
(7)/(10)/(11)
Disable
Operation
0
0
1
1
1
(5)
Enable
Operation
0
1
1
1
1
(4)/(16)
Fault Reset
0 → 1 (Note)
(15)
Note. In faulty communication, hold the state of Bit 7 = 1 for at least 10 ms for the Fault Reset command
to prevent the command from failing to be recognized.
Not ready to
switch on
Switch on
disabled
Ready to
switch on
Switched on
Operation
enabled
Quick stop
active
(1)
(8)
(9)
(10)
(0)
Power off
Power on
(2)
(3)
(6)
(4)
(5)
(7)
(15)
Error occurs
(11)
(12)
(13)
Fault
Fault reaction
active
(14)
(B): Ready-on, Servo-off
Transition by slave
Transition by master
Transition by slave or master
(A): Ready-off, Servo-off
(C): Ready-on, Servo-on
(16)





















































