





























41
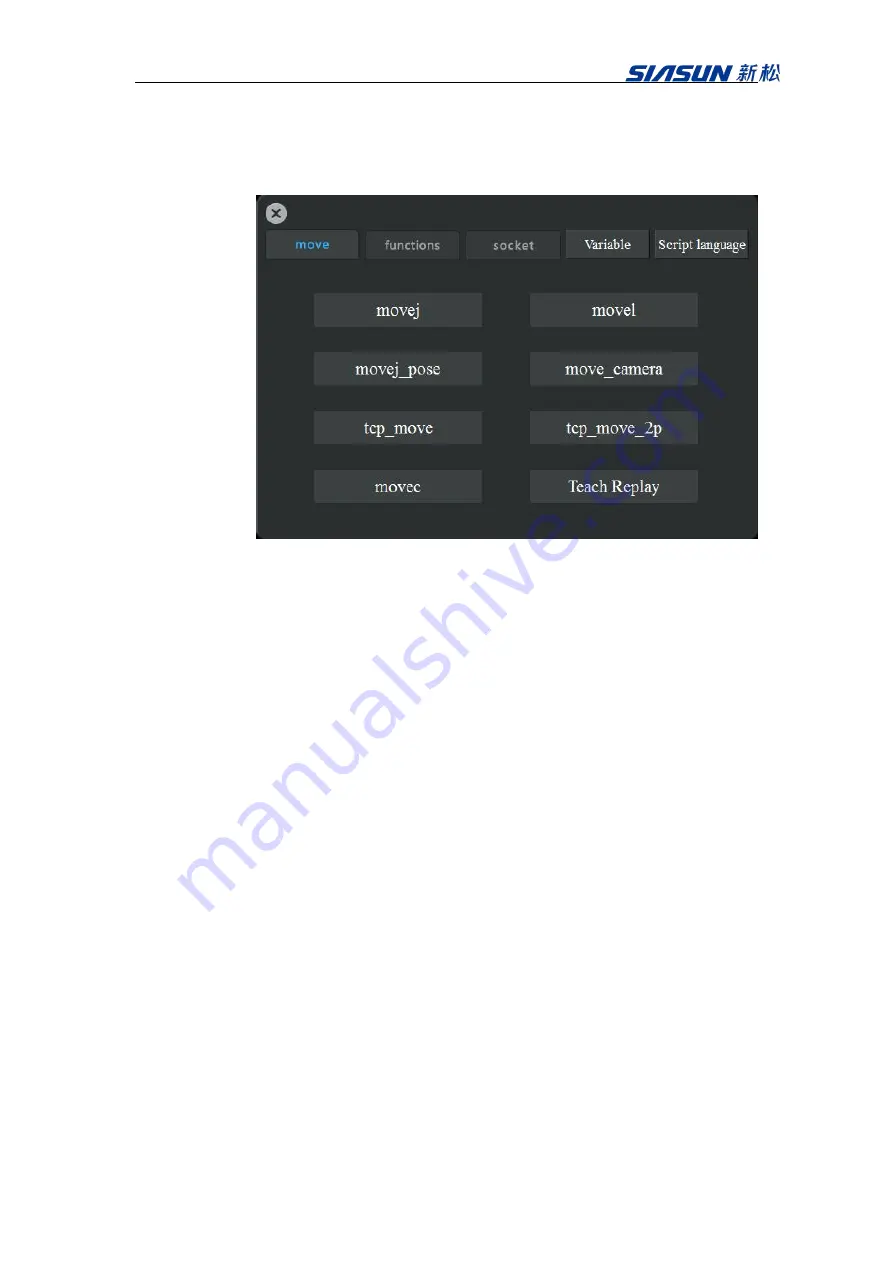
6.2 Move tab
movej
:
The robot arm move joints to the target position. The end trajectory is
unknow. (Start node is a
movej
node)
movel
:
The end of the arm move in a straight line.
movej_Pose
: For a selected location, robot moves to destination with constant
speed for each axis. The required parameter for
movej_pose
is as same as
movel
,
while the movement pattern is as same as
movej
.
movec
: The end of the arm move along an arc. This button will add 2 nodes:
movec_1
and
movec_2
. The robot starts to move from the previous position before
movec_1
, which is the start point of the arc.
movec_1
is a point on the arc;
movec_2
is the end point of the arc.
move_phi
: The robot will keep flange end posture, other axes rotate
collaboratively.
tcp_move
: Robot moves a displacement based on tool coordinate.
move_camera
: It works for programming with camera build-in. P1 is where
camera taking photo and P2 is where robot to grab object. After achieving camera
grabbing function, set up P1, P2 and offset displacement, the robot will finish
grabbing object via camera localization.
Teach Replay
: when the interface is on Teach Replay page, selecting the
order of path to save and clicking
Enter
, the robots enter in standby mode. By
holding the
Teach
button at flange end of robot, the robot starts to record the path
which guided by user. Release the button to end guide process. In the path record
Содержание GCR Series
Страница 41: ...37 6 Robot Programming 6 1 Create program Click Create Program and enter a program name ...
Страница 47: ...43 The functions illustrate below are functions for IO The function illustrate below are logic function ...
Страница 51: ...47 6 6 Example Add a movej and movel node respectively Then add a MoveC node and set it s sub nodes position ...
Страница 53: ...49 ...
Страница 86: ...82 signal_name It represents the name of the modbus node Return Value none Example modbus_delete_signal mbus1 ...





















































