





























Change during operation: N = impossible,
Y* = possible (enabled by using ), Y= possible (enabled by using
)
-58-
FUNC
DATA
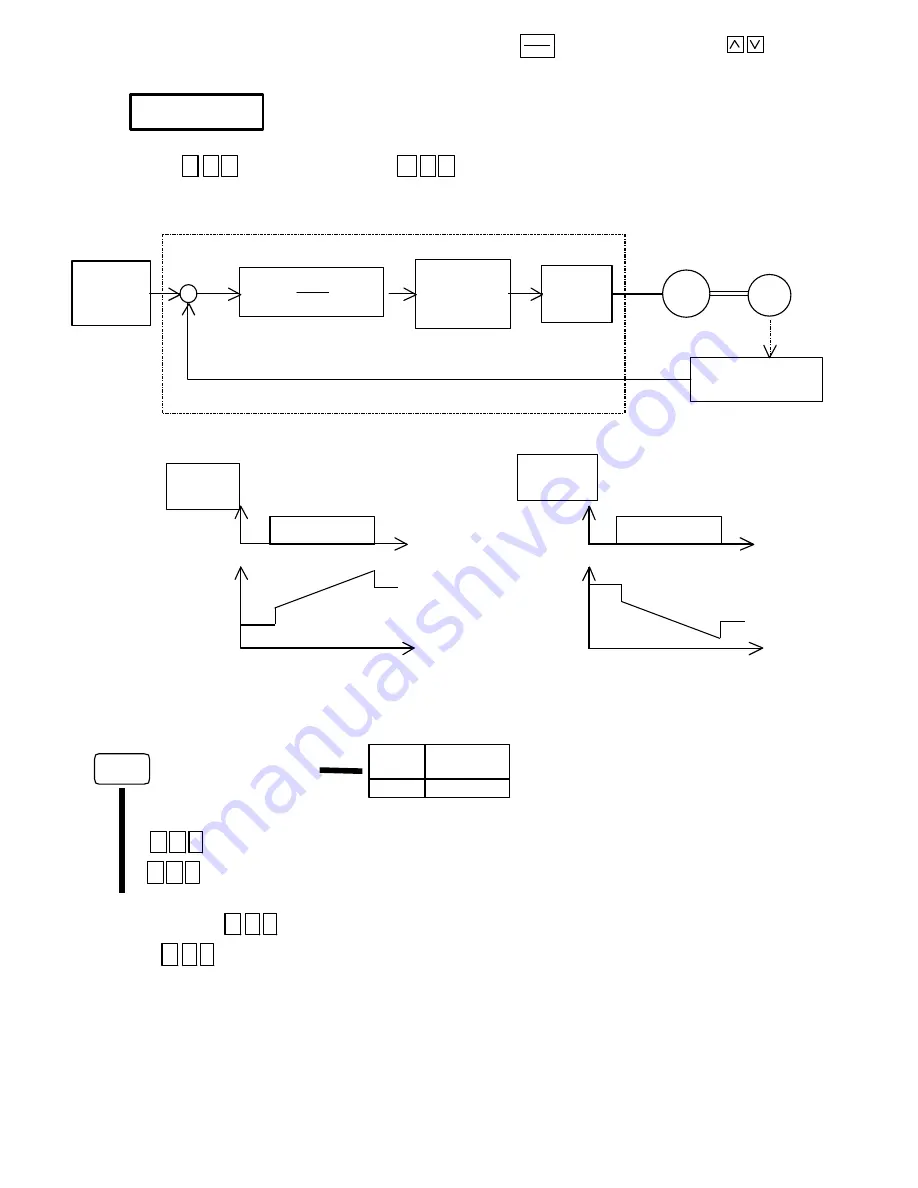
In PID control, an output frequency is adjusted to a feedback value.
Use
F 0 1
to set a frequency and
H 2 1
to make the feedback value and the refer-
ence value equal.
Option selection
(RS485 RTU communication)
0
:
Option inactive
1
:
Option active
Always set
0
when the optional RS485
RTU
serial communication unit is not used.
If
1
is set, Er 8 occurs.
For explanations of “o01” to “o11”, refer to the instruction manual that comes with the
optional RS485 serial communication unit.
PID control
o00
Kp : P-gain Td : Derivative time Ti : Integral time
Output
frequency
Deviation
Normal
operation
Deviation is positive and
frequency increases.
Output
frequency
Deviation
Inverse
operation
Deviation is positive and
frequency decreases.
Td)
s
Ti
s
1
(1
Kp
⋅
+
⋅
+
⋅
Reference
frequency
Feedback value
(sensor)
_
+
Switching between
Normal and
Inverse operation
Drive
output
PID arithmetic unit
Deviation
IM
P
VM10
Factory
setting
Change during
operation
0
Y*







































































