


















生活美好,臂不可少
http://www.realman-robotics.com
115
Fig. 9-4 Waypoint1 setting in the teach software.
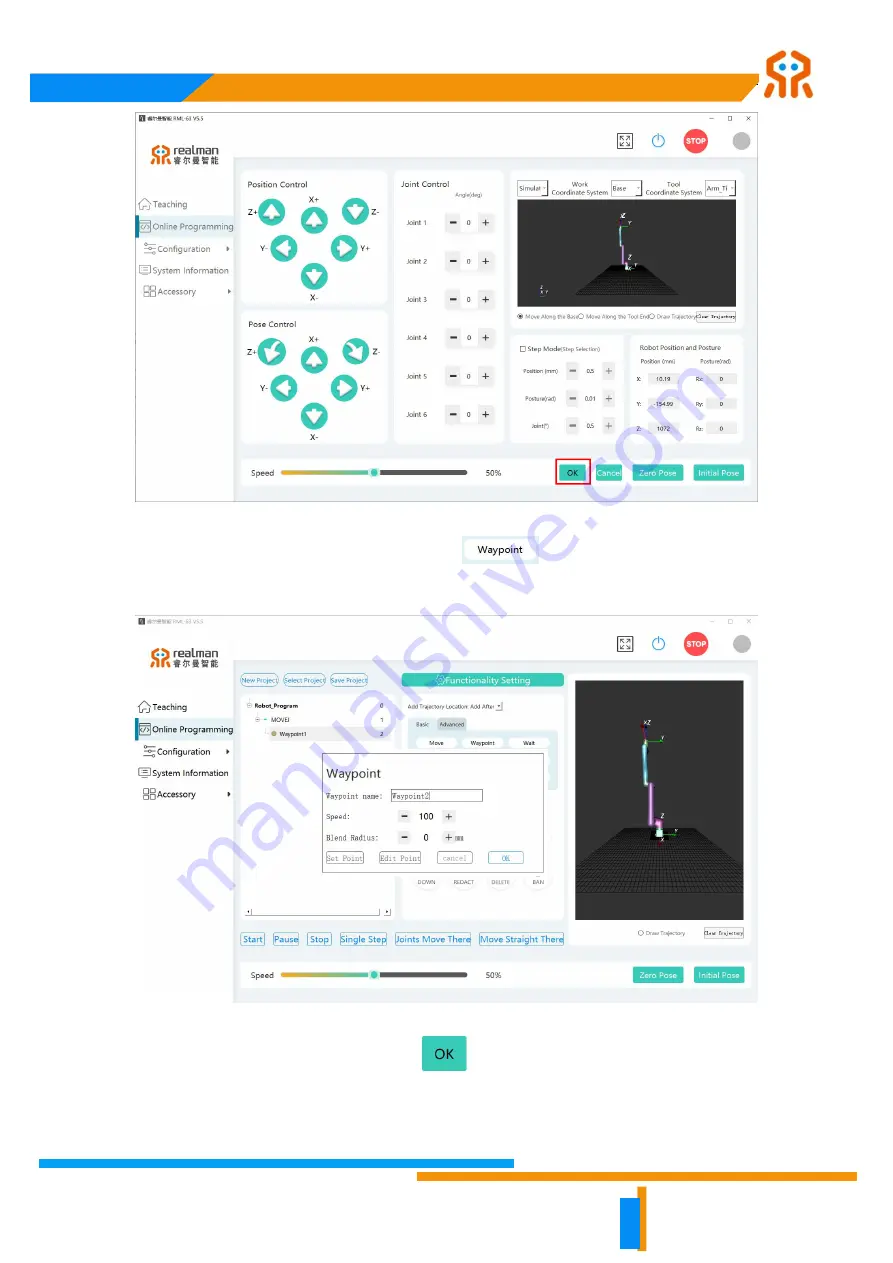
8. Select the reference command line, click
, and it pops up the Waypoint
parameter setting window.
Fig. 9-5 Add the 2
nd
waypoint, i.e., Waypoint2.
9. After setting the location, click the
button to add a second waypoint. The
system will automatically name it "Waypoint2".