





























生活美好,臂不可少
http://www.realman-robotics.com
101
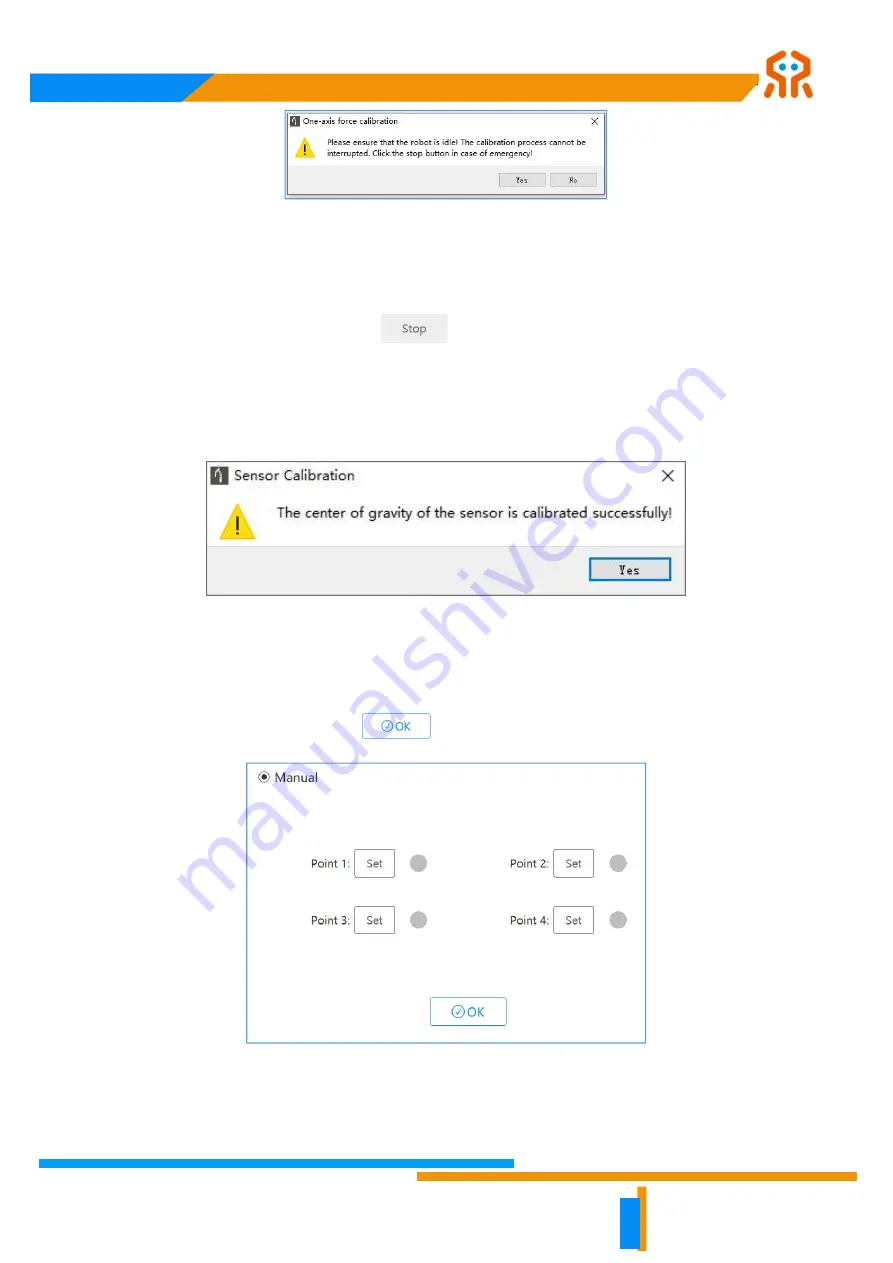
Fig. 8-127 Status confirmation prompt.
Click the "Yes" button and the robot will automatically run the 4 set of predefined
poses to calculate the center of gravity. If there is a risk of robot collision during the
movement, you need to click the
button to terminate the operation.
After the calibration of the gravity of the six-axis force is successful, the "center of
gravity of the sensor is calibrated successfully" prompt will pop up, and the
calibration is completed.
Fig. 8-128 Completion of the six-axis force sensor calibration.
In the manual calibration, check the
manual setting
marquee, set 4 points through the
robot teach pendant software interface, and after the 4 points are recorded (as shown
in the figure below), click the
button.
Fig. 8-129 Manual calibration of the six-axis force sensor.
The robot automatically calculates the center of gravity of the six-axis force. After the
calibration of the gravity of the six-axis force is successful, the "center of gravity of







































































