























41
41
RISERVATO AL PERSONALE AUTORIZZATO ALL'INSTALLAZIONE - ONLY FOR INSTALLATION-AUTHORIZED STAFF
IST
DEM
ZUR
INSTALLATION
AUTORISIERTEN
PERSONAL
VORBEHALTEN
- SEULEMENT
POUR
LE
PERSONNEL
AUTORISE
A
L'INSTALLATION
- RESERVADO
AL
PERSONAL
ENCARGADO
DE
LA
INSTALACION
0579-M070-0
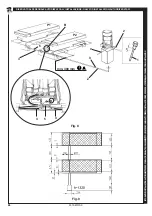
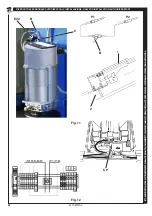
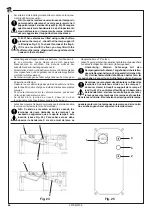
c. Verifica funzionamento micro FC1 (vedi Fig.13)
Per verificare il buon funzionamento di
FC1
è necessario porre
sotto la pedana
P1
un qualsiasi ostacolo durante la fase di discesa.
Se tutto funziona bene il sollevatore si blocca; a questo punto per
riuscire a scendere occorre risalire (è l'unica azione permessa)
fino a che non si riesce a rimuovere l'ostacolo; poi si ridiscende.
d. Comandi a uomo presente
Il sollevatore è dotato di un sistema operativo del tipo "uomo
presente", le operazioni di salita e di discesa, comandate da
pulsanti sono immediatamente interrotte al rilascio di questi ultimi.
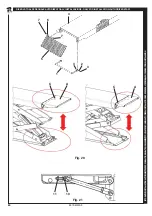
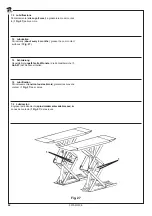
4.16
Montaggio rampine di salita
Rif. Fig.
20
- Montare il supporto rampa
1
mediante perno
2
e
seeger
3
alla pedana
4
, poi la rampina
5
con perno
6
e seeger
7
.
Prestare attenzione a montare le rampine sul lato corretto
rispetto alle pedane. La rampina
A
(fig.
20
), di lunghezza
maggiore, deve essere montata dal lato dei cilindri. La rampina
B
, di lunghezza inferiore, deve essere montata dal lato opposto
ai cilindri.Al fine di evitare lo scambio delle rampine, sulle
pedane sono presenti i perni saldati
C
che impediscono il
montaggio della rampina non corrispondente.
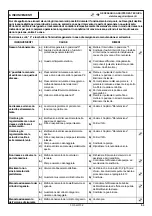
4.17
Registrazione livellamento rampine
Rif. Fig.
21
- Registrazione mediante vite
10
poi fissare con
controdado
11
.
c. Checking that the microswitch works properly FC1 (Ref.
Fig.13)
To check that the
FC1
works properly, place an obstacle beneath
footboard
P1
as the lift is descending. If everything works
properly, the lift will stop; at this point, in order to lower the lift, you
first have to raise it (this is the only action possible) until the
obstacle can be removed; then descent can be completed.
d. "Man-present" commands
The lift is equipped with a "man-present" system of operation. The
rise and descent operations, button-controlled, come to an imme-
diate halt when the buttons are released. If this does not happen,
adjust the microswitch.
4.16 Assembling ramps
Ref. Fig.
20
– Fit ramp support
1
to platform
4
with shaft
2
and
circlip
3
, then fit ramp
5
with shaft
6
and circlip
7
.
Make sure the ramps are attached to the correct side of the
platforms. Ramp
A
(fig.
20
), longer, must be mounted on the
cylinders side. Ramp
B
, shorter, must be mounted opposite to
the cylinders side. To prevent confusing the ramps, the platforms
have welded pins
C
to avoid assembling the incorrect ramp.
4.17
Adjusting the levelling of the ramps
Ref. Fig
21
- Adjust using screw
10
then fasten with counternut
11.
c. Kontrolle der FC1 Mikroschalterfunktionstüchtigkeit (Zu
Abb.13)
Zur Kontrolle der einwandfreien Funktionstüchtigkeit des
FC1
während der Absenkphase ein beliebiges Hindernis unter die
Fahrschiene
P1
stellen. Funktioniert alles einwandfrei, hält die
Bühne an; zur Wiederaufnahme der Absenkbewegung ist die
Hebebühne so lange hochzufahren (nur diese Bewegung ist
erlaubt), bis das Hindernis beseitigt werden kann; dann
herunterfahren.
d. "Totmann"-Schaltung
Die Hebebühne ist mit einem „Totmann“-Betriebssystem versehen.
Die durch Tasten gesteuerten Hub- und Absenkbewegungen
werden automatisch unterbrochen, sobald die entsprechende
Taste losgelassen wird. Sollte diese Funktion nicht erfolgen, den
Mikroschalter einstellen.
4.16 Montage der kleinen Heberampen
Bz. Abb.
20
– Die Rampenstütze
1
mit dem Zapfen
2
und dem
Seegerring
3
auf der Plattform
4
und dann die kleine Rampe
5
mit dem Zapfen
6
und dem Seegerring
7
montieren.
Darauf achten, dass die kleinen seitlichen Rampen korrekt zu
den Fahrschienen montiert werden. Die längere kleine Rampe
A
(Abb.
20
) muss von der Seite der Zylinder her montiert werden.
Die kürzere kleine Rampe
B
muss von der den Zylindern
gegenüberliegenden Seite her montiert werden.Um eine
Verwechslung der kleinen Rampen zu vermeiden, wurden an
den Fahrschienen Bolzen
C
angeschweißt, die eine Montage
der falschen Rampe ausschließen.
4.17
Einstellung für Rampennivellierung
Zu Abb.
21
- Mit der Schraube
10
einstellen und mit der
Kontermutter
11
befestigen.
c. Contrôle du fonctionnement du microrupteur FC1 (Réf.
Fig.13)
Pour vérifier le bon fonctionnement de
FC1
, il faut déposer sous le
chemin de roulement
P1
un obstacle quelconque pendant la phase
de descente. Si tout fonctionne comme il faut, l’élévateur se
bloque; à ce point, pour arriver à descendre, il faut faire remonter
l’élévateur (c’est l’unique manoeuvre possible) de manière à
pouvoir déplacer l’obstacle; puis, on redescend.
d. Commandes de type “homme mort”
Le pont élévateur est équipé d’un système opérationnel de type
“homme mort”. Les manoeuvres de montée et de descente
commandées par des boutons-poussoirs, sont immédiatement
interrompues au relâchement de ces derniers. Dans le cas
contraire, il faut régler le microrupteur.
4.16 Montage des rampes de montée
Réf. Fig.
20
– Monter le support rampe
1
par le biais de l’axe
2
et de la bague
3
au chemin de roulement
4
, ensuite monter la
rampe
5
à l’aide de l’axe
6
et de la bague
7
.
Lors du montage des rampes faire attention à les positionner sur
le côté correct par rapport aux chemins de roulement. La rampe
A
(fig.
20
), de longueur majeure, doit être installée du côté des
vérins. La rampe
B
, de longueur inférieure, doit être installée du
côté opposé aux vérins. Les goujons soudés
C
sur les chemins
de roulement empêchent de monter la rampe de façon erronée
et donc évitent tout échange des rampes.
4.17 Réglage du niveau des petites rampes d’accès
Réf. Fig.
21
- Régler en intervenant sur la vis
10
et fixer avec
le contre-écrou
11
.
c. Comprobación funcionamiento del microinterruptor FC1
(Ref. Fig.13)
Para comprobar el correcto funcionamiento de
FC1
es necesario
poner debajo de la tarima
P1
cualquier obstáculo durante la
fase de descenso. Si todo funciona bien, el elevador se bloquea;
en este momento, para poder bajar hay que volver a subir (es
la única maniobra permitida) hasta que no se quite el obstáculo;
a continuación se vuelve a descender.
d. Sistema hombre muerto
El elevador está dotado de un sistema operativo del tipo
“hombre muerto”, mediante el cual las operaciones de subida
y bajada, con sus respectivos pulsadores de mando, se
interrumpen cuando el operador deja de maniobrar sobre
dichos pulsadores. De no ser así, regule el microinterruptor.
4.16 Montaje rampas de subida
Ref. Fig.
20
– Montar el soporte rampa
1
con el perno
2
y el
seeger
3
a plataforma
4
, luego la rampa
5
con el perno
6
y el
seeger
7
.
Prestar atención a montar las rampas en el lado correcto con
respecto a las plataformas. La rampa
A
(fig.
20
), de mayor
longitud, debe montarse en el lado de los cilindros. La rampa
B
, de menor longitud, debe montarse en el lado opuesto al de
los cilindros. Para evitar intercambiar las rampas, en las
plataformas se encuentran los pernos soldados
C
que impiden
el montaje de la rampa no correspondiente.
4.17
Ajuste de la nivelación de las rampitas
Ref. Fig.
21
- Regule con el tornillo
10
, luego fijar con la
contratuerca
11
.
Содержание RAV540
Страница 10: ...10 10 0579 M070 0 1 3 1 3 1000 1700 4000 kg 1800...
Страница 14: ...14 14 0579 M070 0 Fig 1 Fig 2...
Страница 89: ...89 0579 M070 0 VERIFICA OCCASIONALE DATA FIRMA DELL INSTALLATORE RANDOM INSPECTIONS DATE INSTALLER SIGNATURE...
Страница 91: ...91 0579 M070 0 CONTROL OCASIONAL FECHA FIRMA DEL INSTALADOR...







































































