





























Chapter 3 Robot Debugging and Components Maintenance
Document Version V1.1.0 (03-07-2022)
22
Step 4
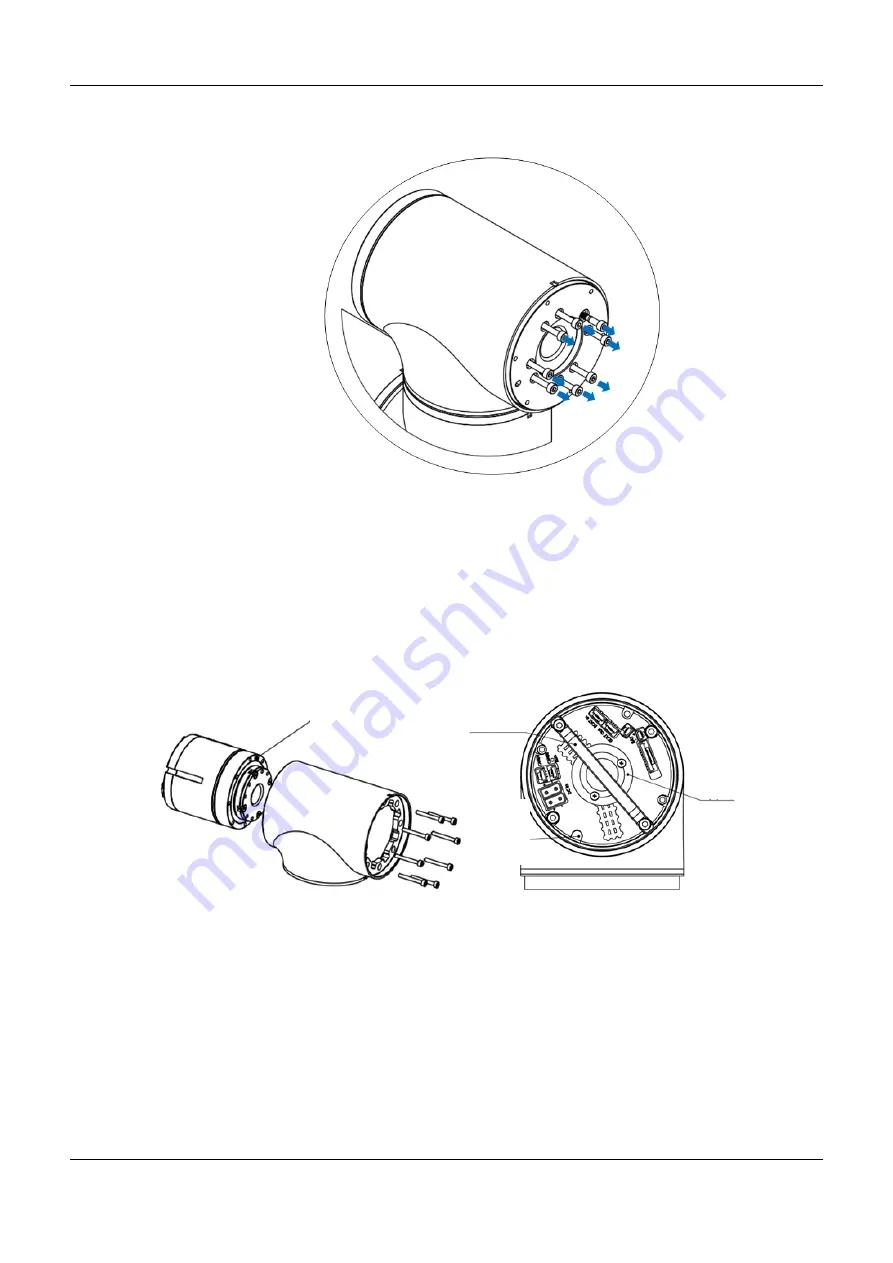
Use Allen wrench to remove the fastening screws from the flange of the Axis J6
module and remove the Axis J6 flange, as shown in Figure 3-12.
Figure 3-12 Remove the screws from the Axis J6 module
Step 5
Gently push and remove the old module from the end flange. Remove the wear
ring, module rubber plug and cable holder from the module.
Step 6
Install the wear ring, module rubber plug and cable holder on the new module,
as shown in Figure 3-13. Apply a layer of Black Power Sealant on the outer
ring of the module (the area between the screw holes), then install the module
on the shell, and tighten the screws (apply a layer of thread glue when
installing the screws) with a screw torque of 2.4N·m, as shown in the figure.
Figure 3-13 Axis J6 module installation diagram
Step 7
Re-thread the signal and power cables at the end pass-through interface to
Axis J3 and connect the interface.
Step 8
Connect the communication and power cables on the Axis J6 module one after
another, fix the cables of Axes J3 ~ J6 with cable ties, and then re-install the
waterproof cover at the rear end.
Step 9
Fill the four countersunk head screws in the inner ring of the module with
Black Power Sealant. Apply a layer of Black Power Sealant on the inner ring of
the flange (the area between screw holes), and then restore the flange end,
Module outer ring
Cable holder
Wear ring
Module
rubber
plug
Содержание MS6MT
Страница 1: ......





































































