



























No. SX-DSV02829 -
75-
Class
No.
At-
trib-
ute *1)
Title
Range
Unit
Function
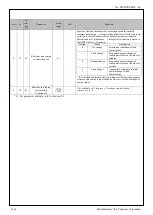
6
31
B
Real time auto
tuning
estimation speed
0–3
—
Set up the load characteristics estimation speed with the real time auto
tuning being valid. A higher setup value assures faster response to a
change in load characteristics but increases variations in disturbance
estimation. Result of estimation is saved to EEPROM every 30 minutes.
Setup
value
Mode
Description
0
No change
Stop estimation of load characteristics.
1
Almost constant
Response to changes in load
characteristics in every minute.
2
Slower change
Response to changes in load
characteristics in every second.
3
*
Faster change
Obtain best suitable estimation in
response to changes in load
characteristics.
* If the automatic oscillation detection is enabled by the support
software, the setup value 3 is used.
6
32
B
Real time auto
tuning custom
setup
(To be
continued)
-32768–32767
—
When the operation mode of real time auto tuning is set to the customize
(Pr 0.02 = 6), set the automatic adjusting function as shown below.
Bit
Content
Description
1–0
Load characteristics
estimation
*1,*2
Enable/disable the load
characteristics
estimation function.
Setup value=0: Disable
Setup value=1: Enable
3–2
Inertia ratio update
*3
Set up update to be made based on result of
the load characteristics estimation of Pr 0.04
“Inertia ratio”.
Setup value=0: Use current setup.
Setup value=1: Update by the estimated value.
6–4
Torque compensation
*4
Set up the update to be made according to the
results of load characteristics estimation of Pr
6.07 “Torque compensation
command additional value”, Pr 6.08 “positive
direction torque compensation value” and Pr
6.09 “negative direction torque compensation
value”.
Note) The positive direction of feedback scale
(after reversal of direction of Pr3.26
"Feedback scale & CS reversal") always
serves as positive.
Setup value=0: Use current setup
Setup value=1: Disable torque compensation
Clear the parameters shown above to zero.
Setting value = 2: Vertical axis mode
Update Pr 6.07. Zero clear Pr 6.08 and Pr 6.09
Setting value = 3: Friction compensation
(low)
Update Pr 6.07. Set low compensation to Pr
6.08 and Pr 6.09.
Setting value = 4: Friction compensation
(middle)
Set middle compensation to Pr 6.08 and
Pr.6.09.
Setting value = 5: Friction compensation
(high)
Set high compensation to Pr 6.08 and
Pr 6.09.
*1 If the load characteristics estimation is disabled, the current setup
cannot be changed even if the inertia ratio is updated according to
the estimated value. When the torque compensation is updated by
the estimated value, it is cleared to 0 (invalid).
*2 If the load characteristics estimation is abled, set Pr6.31 "Real-time
auto tuning presumption speed" besides 0(stop estimation).
(To be continued)
R1.00
Motor Business Unit, Panasonic Corporation