



























No. SX-DSV02829 -
51-
4-4 Toruqe control
Toruqe control is performed based on the torque command object of the EtherCAT communication which is input
from the host controller.
This describe the basic configuration when using the toruqe control.
Toruqe control is required in addition to the torque command speed limit command. Control the working speed of the
motor so that the value does not exceed the speed limit.
Note) When a toruqe command is given so that 0 is routed through like a positive value to negative value or negative value to
positive value while toruqe filter is valid, torque may not be controlled according to the toruqe slope and toruqe filter
settings.
As toruqe control mode, there is a Profiles toruqe control (tq) and Cyclic synchronous toruqe control(cst).
For details, refer to Technical Reference, SX-DSV02830” Section 6-8”, EtherCAT communication specification.
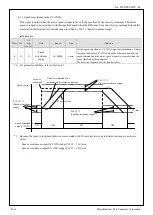
4-4-1 Speed limit function
The speed limit is one of protective functions used during toruqe control.
This function regulates the motor speed so that it does not exceed the speed limit while the toruqe is controlled.
Note: While the speed limit is used to control the motor, the toruqe command applied to the motor is not directly
proportional to the analog toruqe command. Toruqe command should have the following result.: the motor
speed is equal to the speed limit.
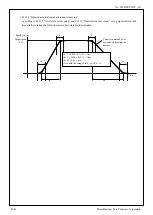
Note: If the motor runs in the direction opposite to the one specified by the torque command given by the host
controller due to disturbance including gravity, the speed will not be within the limit. If this matters, set the
speed at which the motor needs to be stopped in Pr5.13 (over-speed level setting) or Pr6.15 (2nd over-speed
protection level setting) so that Err26.0 (over-speed protection) or Err26.1 (2nd over-speed protection) is
caused to happen in order to stop the motor. For details on over-speed protection, refer to the section 6-3-5.
■ Parameters
Class
No.
At-
trib-
ute *1)
Title
Range
Unit
Function
3
17
B
Speed limit
select
2
—
Set up the selection method of the speed limit used for toruqe
controlling.
Setting value
Speed limit value
2
6080h (Max motor speed)
With this amplifier, it becomes 2 fixation.
*1) For parameter attribute, refer to Section 9-1.
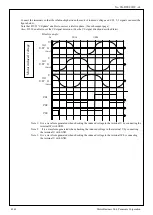
Host
controller
Servo driver
Toruqe
control
section
Toruqe
command
(EtherCAT
communication)
Toruqe
command
generation &
processing
section
EtherCAT
communication
processing
section
V-LIMIT/V_LIM
output function
V-LIMIT
(External output
signal)
speed limit
command
(EtherCAT
communication)
CoE(CiA402) Processing unit
Motor control
Processing unit
R1.00
Motor Business Unit, Panasonic Corporation







































































