





























No. SX-DSV02472 -
91-
(4) Example of movement
(1) When no position command is entered (Servo-ON status)
The motor movable range will be the travel range which is set at both sides of the motor with Pr5.14 since no
position command is entered. When the load enters to the Err34.0 occurrence range (oblique line range),
software limit protection will be activated.
Error occurrence range
Pr 5.14 Pr 5.14
Motor movable
range
Error occurrence range
Motor
Load
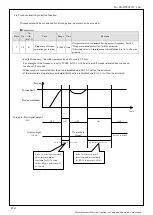
(2) When the load moves to the right (at Servo-ON)
When the position command to the right direction is entered, the motor movable range will be expanded by
entered position command, and the movable range will be the position command input range + Pr5.14 setups in
both sides.
Position command
input range
Pr 5.14
Pr 5.14
Motor movable range
Error occurrence range
Error occurrence range
Motor
Load
(3) When the load moves to the left (at Servo-ON)
When the position command to the left direction, the position command input range will be expanded further.
Position command input range
Pr 5.14
P r5.14
Motor movable range
Error occurrence range
Error occurrence range
Motor
Load
Condition under which the position command input range is cleared
The position command input range will be 0-cleared under the following conditions.
• When the power is turned on.
• While the position deviation is being cleared (When an EMS state transitions from Init to PreOP, servo OFF,
deceleration/stop upon inputting of over-travel inhibition and positional deviation is cleared, etc.)
• At the beginning and ending of trial run via USB communication.
• Velocity or torque is controlled.
• Position information is initialized.
Upon returning to home position, absolute clear through USB (PANATERM), etc.
R1.05
Motor Business Division, Appliances Company, Panasonic Corporation






































































