





























No. SX-DSV02472 -
78-
With the gain set at 100%, calculatory positional deviation is 0, but significant overshoot occurs during
acceleration/deceleration.
If the updating cycle of the positional command input is longer than the driver control cycle, or the pulse
frequency varies, the operating noise may increase while the velocity feed forward is active. If this is the case,
use positional command filter (1st delay or FIR smoothing), or increase the velocity forward filter setup value.
3)
Usage example of torque feed forward
To use the torque feed forward, correctly set the inertia ratio. Use the value that was determined at the start of the
real time auto tuning, or set the inertia ratio that can be calculated from the machine specification to Pr 0.04
Inertia ratio.
The torque feed forward will become effective as the torque feed forward gain is gradually increased with the
torque feed forward filter is set at approx. 50 (0.5 ms).
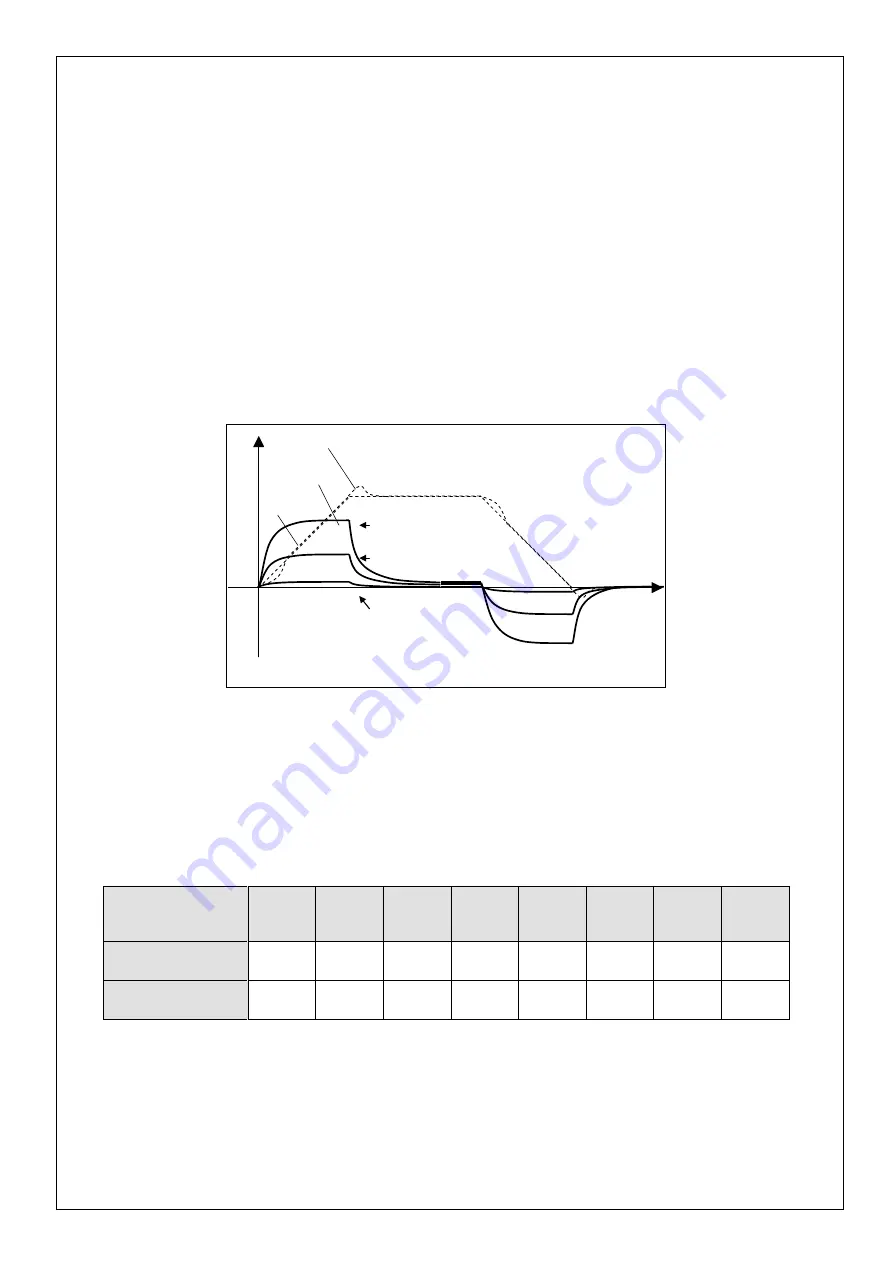
Positional deviation at a constant acceleration/deceleration can be minimized close to 0 by increasing the torque
forward gain. This means that positional deviation can be maintained at near 0 over entire operation range while
driving in trapezoidal speed pattern under ideal condition where disturbance torque is not active.
Command speed
Motor velocity
Positional deviation
Positional deviation in the region where acceleration is constant can be reduced by torque feed forward.
Velocity feed forward gain = Fixed 100 [%]
100 [%]
0 [%]
Torque feed forward gain
50 [%]
Time
Zero positional deviation is impossible in actual situation because of disturbance torque.
As with the velocity feed forward, large torque feed forward filter time constant decreases the operating noise
but increases positional deviation at acceleration change point.
4) Corresponding control mode
In addition, each feedforward which can setup by EtherCAT communication corresponds to the following
control mode.
csp
pp
ip
(Not
supported)
hm
csv
pv
cst
tq
60B1h
(Velocity offset)
valid
valid
valid
valid
valid
valid
invalid
invalid
60B2h
(Torque offset)
valid
valid
valid
valid
valid
valid
valid
valid
R1.05
Motor Business Division, Appliances Company, Panasonic Corporation






































































