





























8-9
8.1.4 Setting and Operation of J Point Control
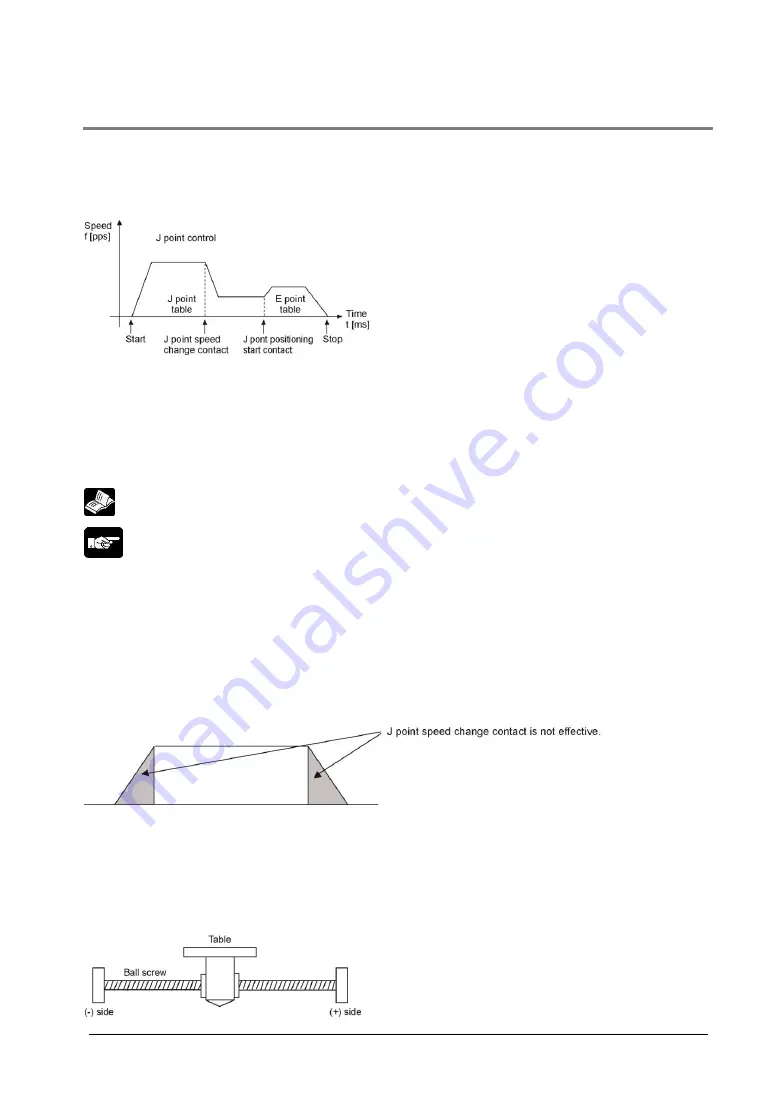
The J point control is performed at the target speed from the beginning of the operation until the J point
positioning start contact turns on, and once the contact turns on, the next position control will be started.
The J point control can be used only for a single axis control. Note that it cannot be used for the
interpolation control.
In the J point control, the speed can be changed during the operation. To change the speed, turn on the
J point speed change contact after changing the following parameters in the parameter setting area.
- J point control code
- J point acceleration time
- J point deceleration time
- J point target speed
Reference:
<17.6.2 Parameter Setting Area>
Note:
The control code, acceleration (deceleration) time and target speed when starting the J point control are
activated by each setting of the table that the J pont control has been specified.
The J point control code, J point acceleration (deceleration) time and J point target speed will become
effective when the speed for the J point control is changed.
Precautions when performing the J point control
In the J point control, although the speed can be changed during the operation, it cannot be changed
when accelerating (decelerating). The contact for changing the speed when accelerating (decelerating)
is ignored, and the speed changes when operating at the constant speed.
Use the increment mode for the position setting method for the P point, C point and E point controls to
be executed after the J point control.
The speed control is performed in the J point contor, however, the positioning moving amount should be
always a value that enables to have a constant speed area at the target speed.
The example below is the case of a single axis control with the positioning unit installed in the slot 0. The
movement amount setting is the increment method, and the unit is set to pulse.
Содержание AFP243710
Страница 16: ...xiv ...
Страница 17: ...Chapter 1 Functions of Unit and Restrictions on Combination ...
Страница 21: ...Chapter 2 Parts and Functions ...
Страница 24: ...2 4 ...
Страница 25: ...Chapter 3 Wiring ...
Страница 39: ...Chapter 4 Power On Off and Items to Check ...
Страница 44: ...4 6 ...
Страница 45: ...Chapter 5 Preparation For Operation ...
Страница 53: ...5 9 ...
Страница 55: ...Chapter 6 I O Allocation ...
Страница 63: ...Chapter 7 Setting Tool Configurator PM ...
Страница 87: ...7 25 Setting Font Select Option Font in the menu bar The following dialog is shown ...
Страница 102: ...7 40 ...
Страница 103: ...Chapter 8 Automatic Operation Position Control ...
Страница 115: ...8 13 ...
Страница 116: ...8 14 When the X axis and Y axis is the moving axes each axis in the above diagram is replaced ...
Страница 129: ...8 27 Reference Chapter 10 Manual Operation Home Return ...
Страница 139: ...Chapter 9 Manual Operation JOG Operation ...
Страница 144: ...9 6 ...
Страница 145: ...Chapter 10 Manual Operation Home Return ...
Страница 151: ...Chapter 11 Manual Operation Pulser Operation ...
Страница 155: ...Chapter 12 Stop Functions ...
Страница 158: ...12 4 ...
Страница 159: ...Chapter 13 Supplementary Functions ...
Страница 171: ...Chapter 14 Precautions During Programming ...
Страница 175: ...Chapter 15 Errors and Warnings ...
Страница 186: ...15 12 ...
Страница 187: ...Chapter 16 Troubleshooting ...
Страница 190: ...16 4 ...
Страница 191: ...Chapter 17 Specifications ...
Страница 241: ...Chapter 18 Dimensions ...
Страница 242: ...18 2 18 1 FP2 Positioning Unit Interpolation Type 2 axis type Unit mm 4 axis type Unit mm ...
Страница 243: ...Chapter 19 Sample Programs ...
Страница 247: ...19 5 ...
Страница 250: ...19 8 ...
Страница 251: ...Chapter 20 Driver Wiring ...
Страница 261: ......







































































