


















71
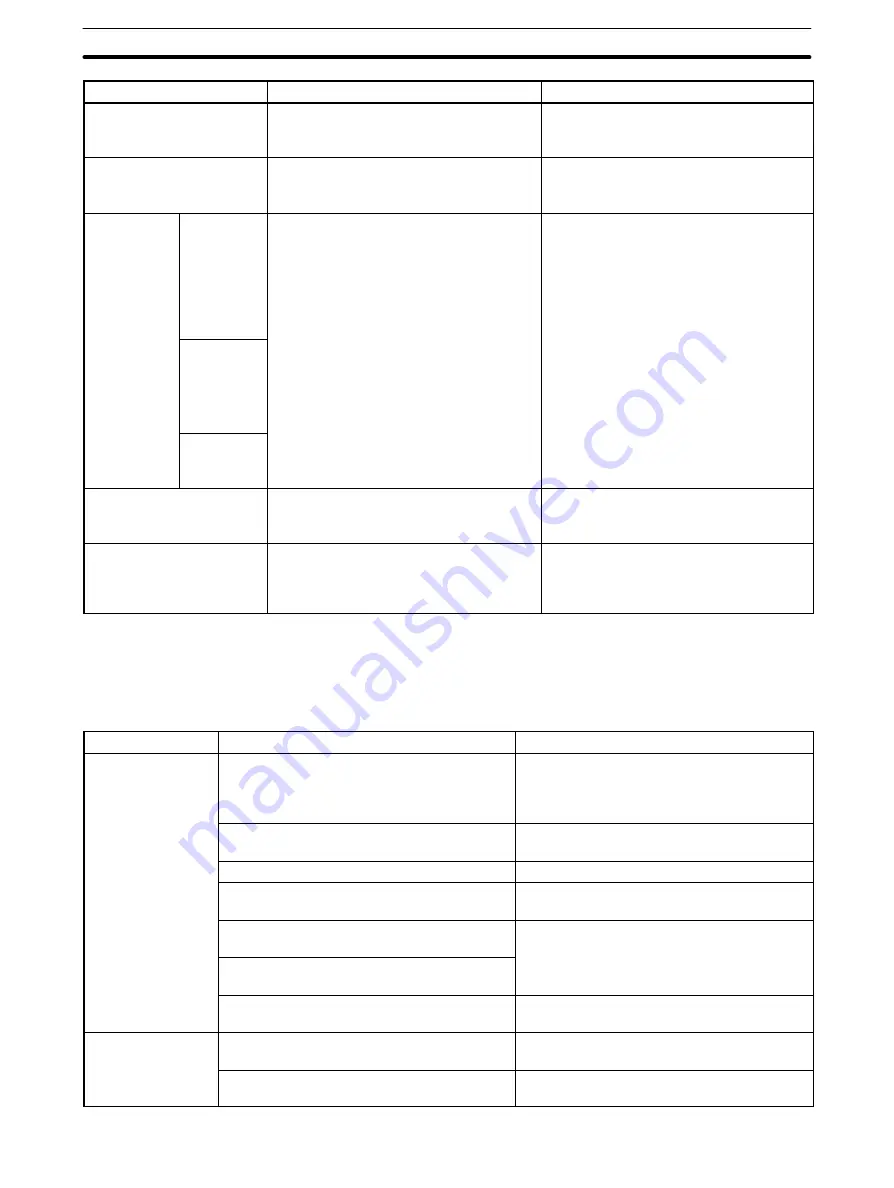
Protection function
Error causes
Action to be taken
Low-voltage protection
(main circuit voltage
insufficient)
Input voltage drop
Check the input power supply voltage
using a tester. If the voltage is low,
adjust the input voltage.
Overtorque detection
Motor current exceeded the set value
because of machine fault or overload.
Check the driven machine and correct
the cause of the fault or set to a higher
value.
Stall pre-
vention
(Accel/decel
is accom-
plished with
maximum
capacity of
the Inverter
During
accelera-
tion
Insufficient power for accel/decel
Overload
Phase loss
Set proper accel/decel time for smooth
operation.
For stall prevention during normal
operation lighten the load or increase
Inverter capacity.
the Inverter
without trip-
ping on
overcurrent
or overvol-
tage.)
During nor-
mal opera-
tion
During
decelera-
tion
Simultaneous forward
and reverse rotation com-
mands
Operation sequence error
3-wire/2-wire selection error
Recheck the control sequence.
Recheck constant settings (No. 32).
External base block sig-
nal input (main circuit
transistor instantaneous
shut-off)
---
---
3-2
Correcting Motor Faults
The following table lists possible causes and corrective actions for
faults that might occur.
Fault
Possible Cause
Corrective Action
Motor does not
rotate.
Power supply voltage is not supplied to
power supply terminals L1 (R), L2 (S), and
L3 (T). (The CHARGE indicator should be
on.)
Turn on power supply.
Turn power supply off and then on again.
Check power supply voltage.
Voltage is not being output to output termi-
nals T1 (U), T2 (V), and T3 (W).
Turn power supply off and then on again.
Load is too large. (Motor is locked.)
Reduce the load. (Release the lock.)
A fault is displayed.
Correct the fault as described in
3-1 Fault
Display.
FWD or REV run command has not been
entered.
Correct the wiring.
Frequency setting signal has not been
entered.
Operation (method selection) Mode setting
is incorrect.
Use the Digital Operator to check the
Operation Method Selection Mode.
Motor rotating in
wrong direction.
Wiring of output terminals T1 (U), T2 (V),
and T3 (W) is incorrect.
Make sure that the terminals’ phase order
matches the motor terminals’.
g
Wiring of FWD or REV run signals is incor-
rect.
Correct the wiring.
Correcting Motor Faults
Section 3-2







































































