





























— 8-30 —
8.5.4. Automatic Gain Switching
Automatic gain switching function is to change over the servo gain for operation to the servo
gain for stopping, depending on the position deviation.
The parameters PG and VG (gains for operation), and the PGL and VGL (gains for stopping) are
used to switch the servo gain. There are two use examples as follow depending on tuned
condition.
1) For control of vibration at stopping by lowering the gain when the gain for operation
cannot be increased because of low dynamic rigidity of the work attached to the Motor.
2) Set lower gain for operation and higher gain for stopping to control vibration when
operating and for short settling time when stopping
Table 8-30: Parameter related to gain switchng function
Category Name
(code)
Function
Initial
setting
Data range
Unit
GP
Threshold to switch gain
0 0: Switch gain off. 1 to 2 621 439
–
pulse
GT
Timer for gain switching
0.0
0.0 to 10 000.0
ms
PG
Position loop proportional gain
0.05
0.01 to 10.00
–
VG
Velocity loop proportional gain
0.50
0.10 to 255.00
–
PGL
Position loop proportional gain for stopping
0.05
0.01 to 10.00
–
Para
meter
VGL
Velocity loop proportional gain for stopping
0.50
0.10 to 255.00
–
Monitor TG
Monitor of gain switching state
–
0: Stopping gain (PGL and VGL)
1: Gain for operation (PG and VG)
–
The gain switching function is not available when the parameter GP is set to GP0. In such case,
the parameters for operation PG and VG is always effective.
If setting of the parameter GP is other than 0, the gains PG and VG are used for operating the
Motor. When the Motor stopped and the position error falls below the setting of parameter GP,
the gains PGL and VGL for stopping are used.
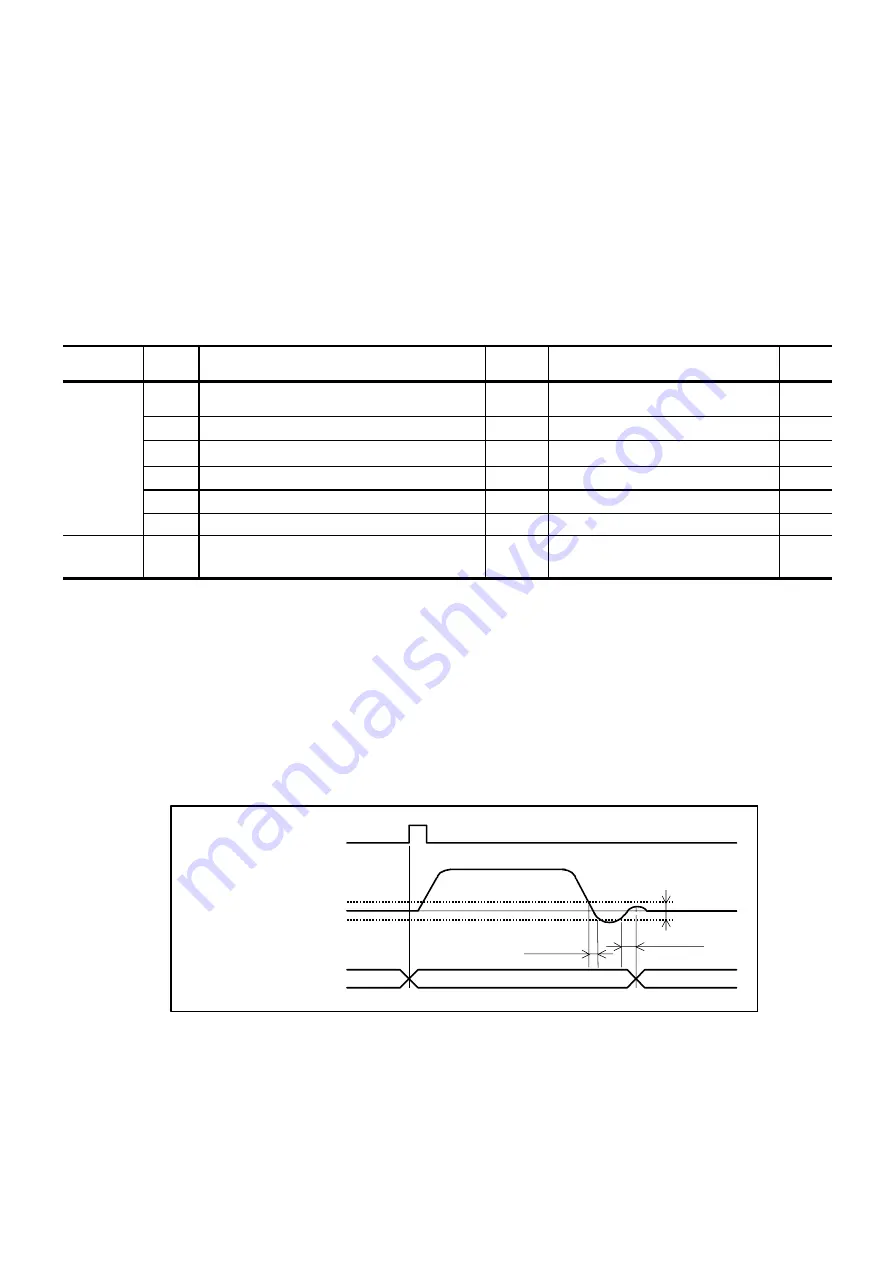
If the parameter GT (Switching gain timer) is set, the gain will be switched to the stopping gain
after confirming that the position error stays below the setting of GP longer than a time set by
the GT.
Fig 8-13: Functioning timing of gain switching
Stability timer
Example: GT5: 5 ms
RS-232C command or
RUN input
< 5 ms
≥
5 ms
Switching gain
PG, VG
PGL, VGL
PGL, VGL
Position error
GP setting
◊
The gains PG and VG are forcibly used when the internal pulses are being generated
for the program positioning or the RS-232C command positioning; or when the pulse
train command is being inputted.
◊
In case of a positioning with external pulse train command, the System regards it as no
pulse input if the inputting pulse frequency falls under 10 [kpps], thus causing frequent
gain switching. In such a case, setting the parameter GT controls frequent gain
switching.
Содержание Megatorque PS Series
Страница 52: ... 2 32 Blank Page ...
Страница 72: ... 4 6 Blank Page ...
Страница 122: ... 6 34 Blank Page ...
Страница 160: ... 7 38 Blank Page ...
Страница 340: ... 11 24 Blank Page ...
Страница 368: ... A 24 Blank Page ...
Страница 370: ......





















































