























8.1 Combinations of CFDL controller and EZ series
8.1.4
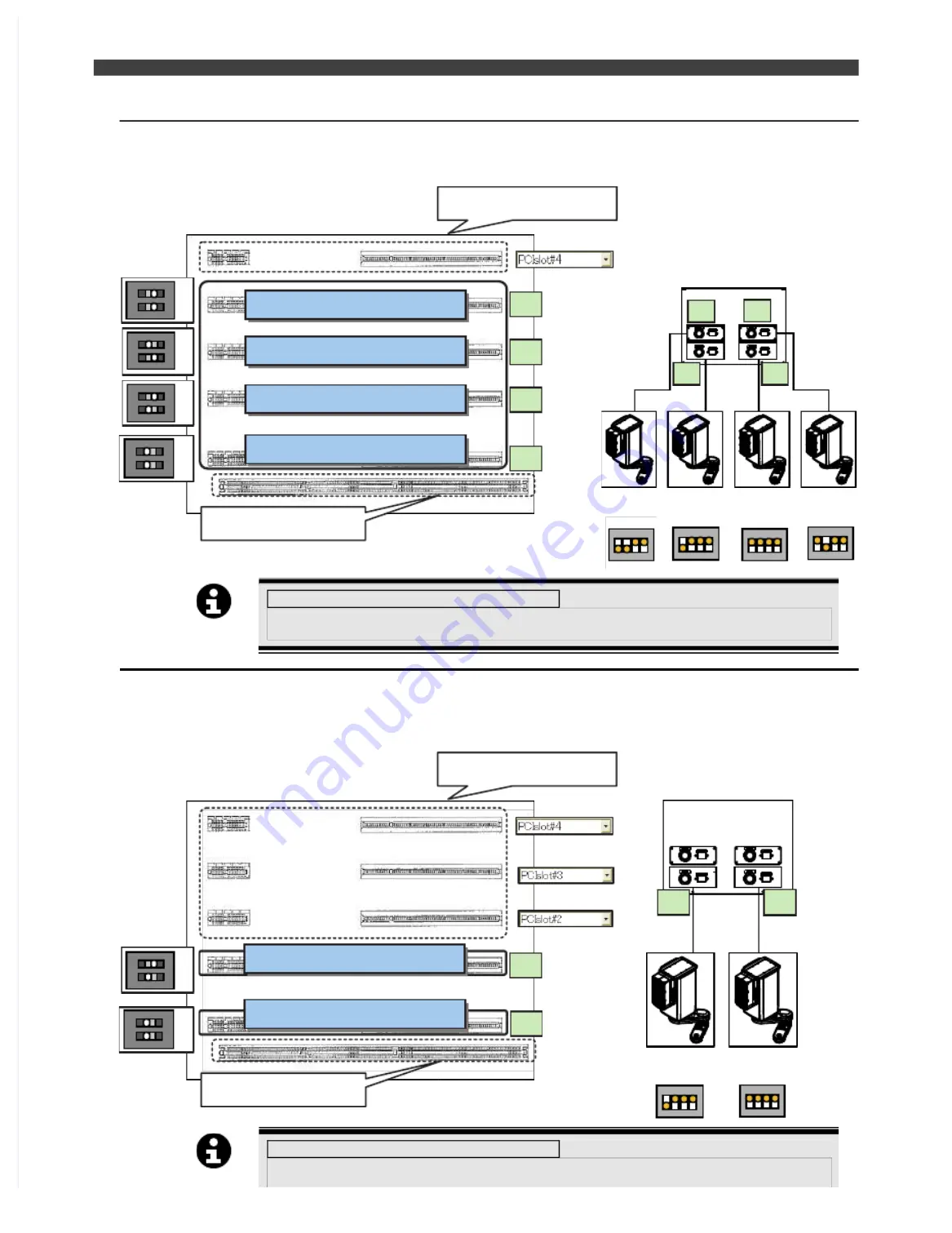
(C) “CFDL4-0000” + Four robots
Below shows the relationship between the number of the sequence board and the number of the back
connector at “CFDL4
+
Four robots”.
4
2
1
3
IMPORTANT
About slot ID when using the fieldbus board
In case of equipping the Fieldbus board such as DeviceNet or CC-LINK etc to the slot for
option then, please refer to the figure up with “Slot ID” and select.
8.1.5
(D) “CFDL4-0020” + Two robots
Below shows the relationship between the number of the sequence board and the number of the back
connector at “CFDL4
+
Two robots”.
2
1
IMPORTANT
About slot ID when using the fieldbus board
In case of equipping the Fieldbus board such as DeviceNet or CC-LINK etc to the slot for
option then, please refer to the figure up with “Slot ID” and select.
4
3
2
1
4
3
2
1
Slot for option x1
CPU Board
2
1
2
1
Slot for option x3
Sequence board 1
Sequence board 1
1
2
O
N
OFF
OFF
1
2
O
N
ON
OFF
1
2
O
N
OFF
ON
1
2
O
N
ON
ON
1
2
O
N
OFF
OFF
1
2
O
N
ON
OFF
CPU Board
Sequence board 2
Sequence board 3
Sequence board 4
Sequence board 2
1
2
3
4
O
N
ON OFF OFF OFF
ROBOT#2
1
2
3
4
O
N
OFF OFF OFF OFF
ROBOT#1
1
2
3
4
O
N
ON OFF OFF OFF
ROBOT#2
1
2
3
4
O
N
OFF OFF OFF OFF
ROBOT#1
1
2
3
4
O
N
OFF ON OFF OFF
ROBOT#3
1
2
3
4
O
N
ON ON OFF OFF
ROBOT#4
Содержание EZ-CFDL Series
Страница 2: ......
Страница 8: ...Table of Contents NOTE ...
Страница 10: ...ぺージあわせのため白文字 白文字のため印刷されないなので気にしないでください 削除しないでください ...
Страница 58: ...4 4Interference Territory registration NOTE ...
Страница 59: ......
Страница 68: ...5 4File transfer FTP server NOTE ...
Страница 70: ......
Страница 83: ......







































































