





























3.12 Setting the software limit (operating range)
3.12 Setting the software limit (operating range)
3.12
3.12
Setting
Setting
the
the
software
software
limit
limit
(operating
(operating
range)
range)
3.12.1
3.12.1
Outline
Outline
The software limit (operating range) is set to the maximum operating range prior to shipment from the factory.
The software limit (operating range) is set to the maximum operating range prior to shipment from the factory.
If the positions of the "stopper" and "limit switch" are changed or the
If the positions of the "stopper" and "limit switch" are changed or the operating area is changed for operational
operating area is changed for operational
reasons, be sure to also change the software limit. There are the following three ways of setting the software
reasons, be sure to also change the software limit. There are the following three ways of setting the software
limit. For these operations, an operator
limit. For these operations, an operator class
class
EXPERT
EXPERT
or higher is necessary.
or higher is necessary.
(1) Position Recording
(1) Position Recording
The robot is actually operated to move each of its axes to the position you want to set as the
The robot is actually operated to move each of its axes to the position you want to set as the
software limit and then the [REC] key is pressed. For the actual operation, refer to the following
software limit and then the [REC] key is pressed. For the actual operation, refer to the following
pages.
pages.
(2) Data Input
(2) Data Input
The software limit can be set without having to move the robot by inputting
The software limit can be set without having to move the robot by inputting hexadecimals for the
hexadecimals for the
encoder values. Because of the nature of inputting numeric values and the difficulty of predicting
encoder values. Because of the nature of inputting numeric values and the difficulty of predicting
the operating area, be extremely careful when configuring these settings. From "A" to "F" can be
the operating area, be extremely careful when configuring these settings. From "A" to "F" can be
inputted via the following keys.
inputted via the following keys.
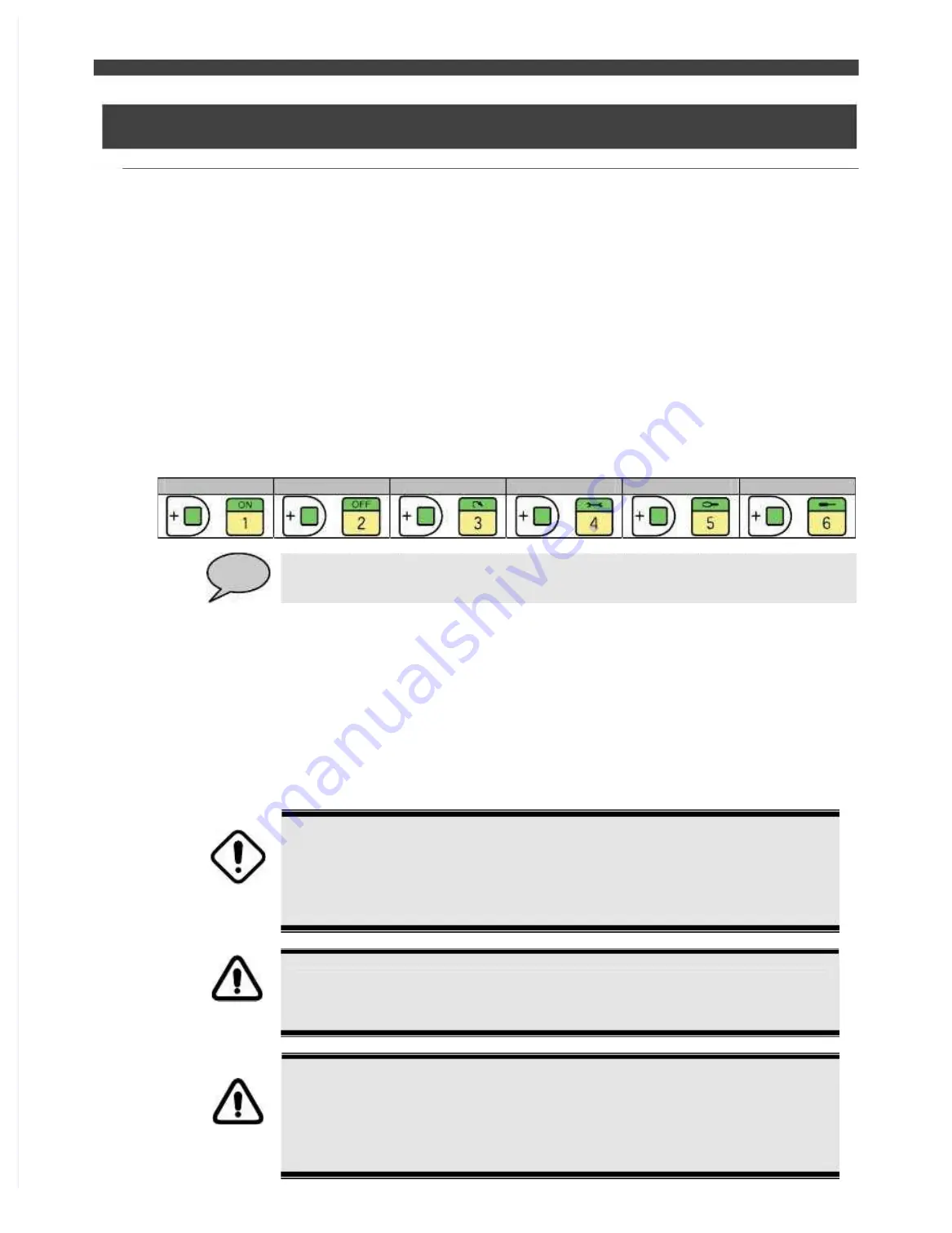
Table 3.12.1
Table 3.12.1 How to input the
How to input the hexadecimal values (A to F)
hexadecimal values (A to F)
A
A
B
B
C
C
D
D
E
E
F
F
+
+
+
+
+
+
+
+
+
+
+
+
POINT
POINT
This menu is convenient in case that software limit value of one robot is copied to that of
This menu is convenient in case that software limit value of one robot is copied to that of
another robot which is same type.
another robot which is same type.
Software limit values (hexadecimals) to be input must be calculated beforehand.
Software limit values (hexadecimals) to be input must be calculated beforehand.
(3) Auto Setting
(3) Auto Setting
The software limit range is calculated automatically from the posture data of programs
The software limit range is calculated automatically from the posture data of programs
registered in the internal memory of the controller and then set. Press <Select> key to select the
registered in the internal memory of the controller and then set. Press <Select> key to select the
programs from the list and then put the check marks for the axes to be used for the calculation.
programs from the list and then put the check marks for the axes to be used for the calculation.
When the <Complete> key is pressed, the software limit (operating range) is automatically
When the <Complete> key is pressed, the software limit (operating range) is automatically
calculated. If it is necessary, set the
calculated. If it is necessary, set the margin parameters and then save the result
margin parameters and then save the result with <Complete>
with <Complete>
key. When the software limit is set automatically, only the r
key. When the software limit is set automatically, only the r obot posture data included in
obot posture data included in programs
programs
is used to calculate the software limit. Therefore, an error may be generated if an interpolation
is used to calculate the software limit. Therefore, an error may be generated if an interpolation
operation results in the robot attempting a
operation results in the robot attempting a movement that exceeds the software limit. After setting
movement that exceeds the software limit. After setting
the software limit automatically, confirm that all programs move the robot without a problem.
the software limit automatically, confirm that all programs move the robot without a problem.
Furthermore, if an error is generated,
Furthermore, if an error is generated, adjust the ±margin values.
adjust the ±margin values.
DANGER
DANGER
The software limit function is not for
The software limit function is not for defining the limit area*. To
defining the limit area*. To change the limit area, use
change the limit area, use
the "stopper" and
the "stopper" and "limit switch".
"limit switch".
Unexpected robot motion leading to a person being hit
Unexpected robot motion leading to a person being hit or caught may result in loss of life,
or caught may result in loss of life,
serious injury, or an accident.
serious injury, or an accident.
**
Limit area: The area the robot cannot move out of even if there is a failure or
Limit area: The area the robot cannot move out of even if there is a failure or
malfunction with the robot system.
malfunction with the robot system.
WARNING
WARNING
When software limit is changed, please do not forget
When software limit is changed, please do not forget to confirm that robot surely stops at
to confirm that robot surely stops at
the defined software limit by manual operation. If this procedure is omitted, wrong setting
the defined software limit by manual operation. If this procedure is omitted, wrong setting
by mistaking operation may result in loss of
by mistaking operation may result in loss of life, serious injury, or an accident.
life, serious injury, or an accident.
CAUTION
CAUTION
The following items are
The following items are
not supported
not supported
for auto setting of the software limit.
for auto setting of the software limit.
(1) Servo gun axis*(The checkmark cannot be turned ON)
(1) Servo gun axis*(The checkmark cannot be turned ON)
(2) Endless axis*(The checkmark cannot be turned
(2) Endless axis*(The checkmark cannot be turned ON)
ON)
(3) Other than angle commands of robotic language
(3) Other than angle commands of robotic language for each axis angle (MOVE/
for each axis angle (MOVE/
MOVEJ/MOVEX_J/MOVEX_E)
MOVEJ/MOVEX_J/MOVEX_E)
* Calculation is not performed automatically, but values can
* Calculation is not performed automatically, but values can be input directly in the
be input directly in the data
data
input area.
input area.
Содержание EZ-CFDL Series
Страница 2: ......
Страница 8: ...Table of Contents NOTE ...
Страница 10: ...ぺージあわせのため白文字 白文字のため印刷されないなので気にしないでください 削除しないでください ...
Страница 58: ...4 4Interference Territory registration NOTE ...
Страница 59: ......
Страница 68: ...5 4File transfer FTP server NOTE ...
Страница 70: ......
Страница 83: ......







































































