

























Confirming the operation 2-45
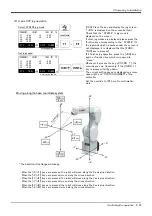
・When the [+A (J4)] keys are pressed, the control point will rotate in the plus direction around the X axis (Xw)
of work coordinates system (Ex-T coordinates system).
When the [-A (J4)] keys are pressed, the control point will rotate in the minus direction.
・ When the [+B (J5)] keys are pressed, the control point will rotate in the plus direction around the Y axis (Yw)
of work coordinates system. (Ex-T coordinates system).
When the [-B (J5)] keys are pressed, the control point will rotate in the minus direction.
・ When the [+C (J6)] keys are pressed, the control point will rotate in the plus direction around the Z axis (Zw)
of work coordinates system. (Ex-T coordinates system).
When the [-C (J6)] keys are pressed, the control point will rotate in the minus direction.
+X
+Y
+Z
-Z
-Y
-X
+Xw
+Yw
+Zw
-Zw
-Xw
-Yw
+
-
+
-
-
+
+X
+Y
+Z
-Z
-Y
-X
+Xw
+Yw
+Zw
-Zw
-Xw
-Yw
+
-
+
-
-
+
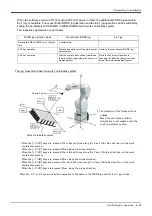
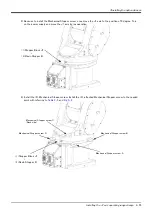
<2> Ex-T jog mode
* The control point rotates around each axes of work coordinates system (Ex-T coordinates system).
When the [+A (J4)] or the [-A (J4)] key is pressed, the control point rotates around the Xw axis. When the
[+B (J5)] or the [-B (J5)] key is pressed, the control point rotates around the Yw axis. When the [+C (J6)]
or the [-C (J6)] key is pressed, the control point rotates around the Zw axis.
Work coordinates system
(Ex-T coordinates system)
Control point
Work coordinates system
(Ex-T coordinates system)
Control point
+X
+Y
+Z
-Z
-Y
-X
+Xw
+Yw
+Zw
-Zw
-Xw
-Yw
+
-
+
-
-
+
SPACE
,
Work coordinates system
(Ex-T coordinates system)
Control point
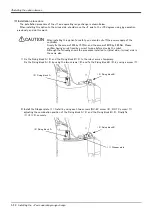
◇◆◇ When the robot is in the transportation posture ◇◆◇
There are directions from which linear movement is not possible from the transportation posture. In this case, the
robot will not move. Refer to section
Page 29, "(1) JOINT jog operation"
", and move the robot to a position where
linear movement is possible, and then carry out XYZ jog.
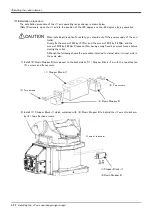
◇◆◇If the buzzer of T/B sounds and the robot does not move ◇◆◇
If it is going to move the robot across the operation range, the buzzer of T/B sounds and the robot does not
move. In this case, please move to the counter direction.
Содержание RV-13FM-SE Series
Страница 2: ......
Страница 138: ...Appendix 128 Configuration flag 6Appendix ...
Страница 139: ......







































































