
























Confirming the operation 2-43
When the software version is R5 (F-Q series)/S5 (F-D series) or later, the additional WORK jog operation,
Ex-T jog, is available. The conventional WORK jog operation and the Ex-T jog operation can be switched by
setting the parameters WK1JOGMD to WK8JOGMD of each work coordinates system.
The respective operations are as follows.
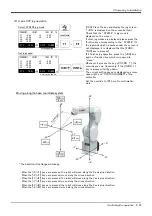
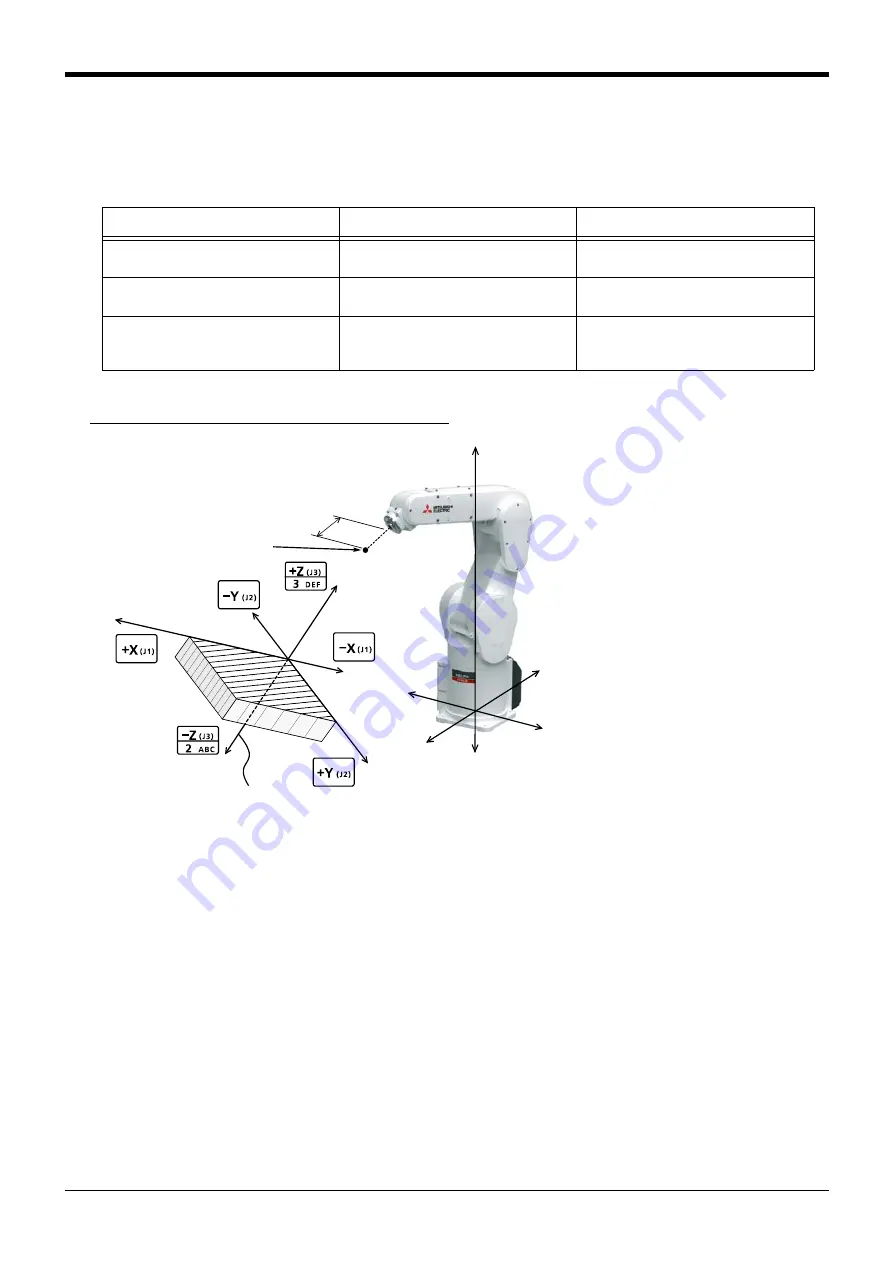
・ When the [+X (J1)] keys are pressed, the robot will move along the X axis (Xw) plus direction on the work
coordinates system.
When the [-X (J1)] keys are pressed, Move along the minus direction.
・ When the [+Y (J2)] keys are pressed, the robot will move along the Y axis (Yw) plus direction on the work
coordinates system.
When the [-Y (J2)] keys are pressed, Move along the minus direction.
・ When the [+Z (J3)] keys are pressed, the robot will move along the Z axis (Zw) plus direction on the work
coordinates system.
When the [-Z (J3)] keys are pressed, Move along the minus direction.
When the X, Y, or Z keys are used, the operation is the same in the WORK jog and the Ex-T jog modes.
WORK jog operation mode
Conventional WORK jog
Ex-T jog
Parameters WKnJOGMD (n is 1 to8) set-
ting
0 (initial value)
1
XYZ key operation
Moves along each axis of the work coordi-
nates system
Same as the conventional WORK jog
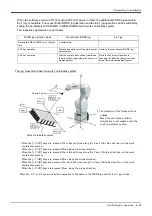
ABC key operation
With the control point position maintained,
the direction changes along the work coor-
dinates system.
While the control point position is
changed, the direction changes on each
axis of the work coordinates system.
+X
+Y
+Z
-Z
-Y
-X
ツ
ー
ル
長
+Xw
+Yw
+Zw
The jog movement based on work coordinates system
* The direction of the flange will not
change.
Move the control point with a
straight line in accordance with the
work coordinates system
Work coordinates system
To
ol
len
gt
h
Controll point
Содержание RV-13FM-SE Series
Страница 2: ......
Страница 138: ...Appendix 128 Configuration flag 6Appendix ...
Страница 139: ......







































































