




























Maintenance and inspection procedures
(7) Inspection, maintenance and replacement of J6-axis timing belt
The reference figure at inspection, adjustment, and replacement of the timing belt is shown in
(RV-4F/
7F series, RV-7FLL) or
(RV-13F/20F).
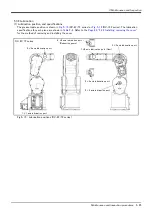
Fig.5-12 : Inspection, maintenance and replacement of J6 axis timing belt (RV-4F/7F series, RV-7FLL)
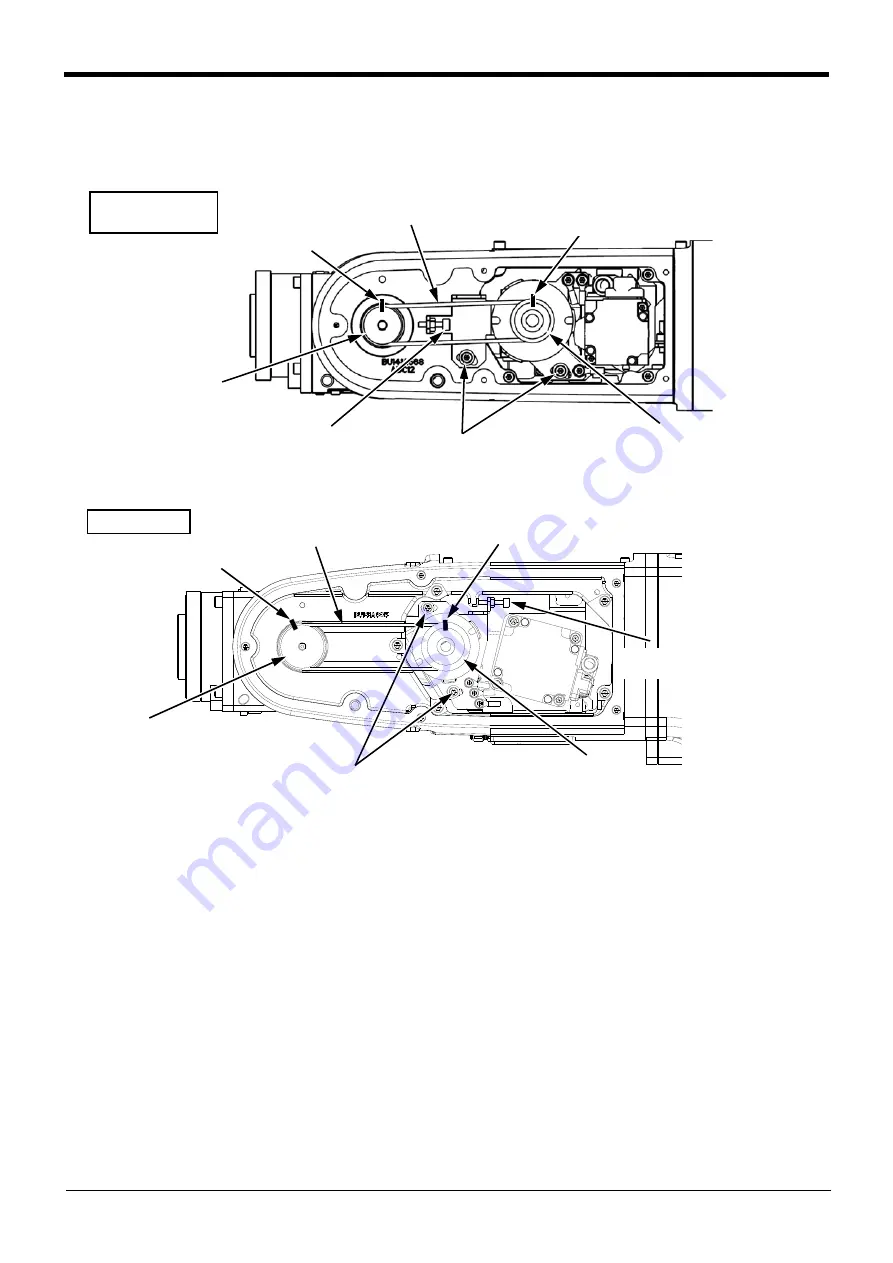
Fig.5-13 : Inspection, maintenance and replacement of J6 axis timing belt (RV-13F/20F)
■ Inspecting the J6 axis timing belt
1) Confirm that the robot controller power is OFF.
2) Refer to
Page 82, "5.3.2 Installing/removing the cover"
, and remove the No. 2 arm cover R
3) Visually confirm that the symptoms indicated in
"(1)Timing belt replacement period"
have not occurred with
the timing belt.
4) Confirm that the belt tension is adjusted to slacken as shown in
■ Adjusting the J6 axis timing belt
1) Carry out steps 1) and 2) indicated in
" ■ Inspecting the J6 axis timing belt"
above.
2) Lightly loosen the two motor plate fixing screws <1>. (Do not loosen too much.)
3) The nut which is fixing tension adjustment screw <3> is loosened, turn tension adjustment screw <3>, and
adjust the tension of timing belt <2>.
When the screw is turned to the right, the belt will be stretched, and when turned to the left, will loosen.
Adjust the belt tension slack to within the range as shown in
If the belt is loosened too much when adjusting the tension causing it to come off the timing pulleys <4> and
<5>, or if the belt and pulley teeth engagement is deviated, the machine system's origin will deviate.
4) After adjustment fastens the fixing nut of tension adjustment screw <3>, and certainly fixes tension
adjustment screw <3>.Moreover, also fasten motor plate fixing screw <1> certainly. (two pc.) Improper tight
-
ening can cause the belt to loosen with vibration.
<2> Timing belt
<4> Timing pulley
(motor side)
<3>Tension adjustment screw
With the fixing nut
Mark
<1>Motor plate fixing screw
<5> Timing pulley
(joint side)
Mark
RV-4F/7F series
RV-7FLL
RV-13F/20F
<2> Timing belt
<4> Timing pulley
(motor side)
<3>Tension adjustment screw
With the fixing nut
<1>Motor plate fixing screw
<5> Timing pulley
(joint side)
Mark
Mark
Содержание RV-13FM-SE Series
Страница 2: ......
Страница 138: ...Appendix 128 Configuration flag 6Appendix ...
Страница 139: ......







































































