
























EMERGENCY-STOP connection
Connection
4 - 10
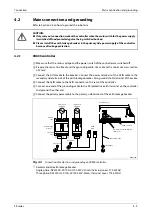
4.3 EMERGENCY-STOP
connection
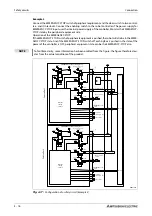
Connection for EMERGENCY-STOP pushbutton is using the plug on the rear of the unit for the CR800
controller.
The EMERGENCY-STOP inputs are normally blank (see Fig. 4-11). The EMERGENCY-STOP pushbutton,
the door closing contact and the enable switch (enabling) unit must be connected by the user.
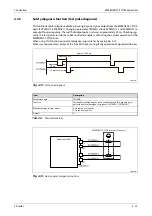
4.3.1
Classification of functions using external input/output signals
Before using the functions, note the following.
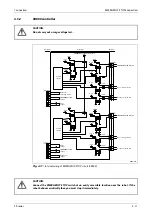
R002721E
Fig. 4-10:
Connection for EMERGENCY-STOP circuit
Classification
Function
Description
Safety signal
EMERGENCY-STOP input
Detects EMERGENCY-STOP inputs. The safety diagnosis function for the
EMERGENCY-STOP input circuit makes the STO function meet the
requirements of Category 4, Performance Level e. At factory settings,
the STO function meets the requirements of Category 3, Performance
Level d. To make the STO function meet the requirements of Category
4, Performance Level e, change the parameter setting by referring to
section 4.3.3.
Mode selector switch input
Switches the controller mode between MANUAL and AUTOMATIC.
Door switch input
Receives the status of the switch installed on the door of the safety
fence to detect the opening of the door.
Non-safety signal
Emergency stop output
Monitors whether the robot is in the EMERGENCY-STOP state.
Mode output
Monitors whether the robot operates in MANUAL or AUTOMATIC
mode.
Robot error output
Monitors the error status of the robot.
Additional axis
synchronization output
Synchronizes the state of the additional axes (servo ON/OFF) with that
of the robot arm.
Tab. 4-1:
Classification of functions using external input/output signals
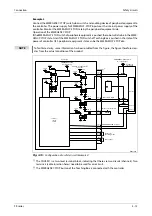
CNUSR11 connector
Содержание MELFA RH-FRH-D
Страница 2: ......
Страница 4: ......
Страница 6: ......
Страница 16: ...Contents X ...
Страница 22: ...Environmental conditions for operation Introduction 1 6 ...
Страница 70: ...Grounding the robot system Installation 3 32 ...
Страница 90: ...Teaching Box connection Connection 4 20 ...
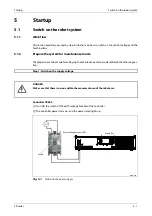
Страница 96: ...Switch on the robot system Startup 5 6 ...
Страница 128: ...Dimensions Appendix A 18 ...
Страница 130: ...A 20 Index Appendix ...
Страница 131: ......
Страница 132: ......
Страница 133: ......
Страница 134: ......
Страница 135: ......
Страница 136: ......
Страница 137: ......
Страница 138: ......
Страница 139: ......
Страница 140: ......
Страница 141: ......
Страница 142: ......
Страница 143: ......
Страница 144: ......
Страница 145: ......
Страница 146: ......
Страница 147: ......
Страница 148: ......
Страница 149: ......
Страница 150: ......
Страница 151: ......
Страница 152: ......
Страница 153: ......
Страница 154: ......
Страница 155: ......
Страница 156: ......
Страница 157: ......
Страница 158: ......
Страница 159: ......
Страница 160: ......
Страница 161: ......
Страница 162: ......
Страница 163: ......
Страница 164: ......
Страница 165: ......