






















32
SC100/200 Series Function Block Application Manual EM-6460-C
■
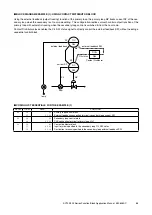
CODING LIST ESSENTIALS
GROUP
ITEM
DATA
FUNCTION
02
10
48
49
56
2 2
1
3 1 2 1
0 4 2 2
Primary loop control block
Output compensation method set to ‘addition’ (for manual resetting)
Output compensation connection terminal (for manual resetting)
External feedback connection terminal (secondary loop PV)
03
10
2 2
Secondary loop control block
30
10
11
13
14
7 6
0 2 2 3
s e t
s e t
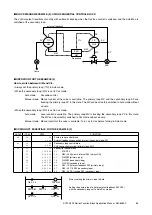
High/low alarm block
X1 connection terminal (deviation output from the primary loop)
Low setpoint (%)
Hysteresis (deadband) (%)
31
10
11
7 5
s e t
Parameter selector block
A1 parameter (manual reset value)
32
10
11
12
13
14
15
16
7 9
0 2 4 2
0 2 4 3
0 2 4 4
s e t
0
s e t
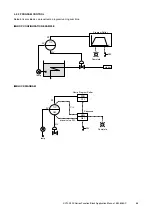
Parameter setter block (PD)
G1 connection terminal (to the primary control block PB)
G2 connection terminal (to the primary control block TI)
G3 connection terminal (to the primary control block TD)
A1 parameter (PB)
A2 parameter (TI : withtout)
A3 parameter (TD)
33
10
11
12
13
14
15
16
7 9
0 2 4 2
0 2 4 3
0 2 4 4
s e t
s e t
s e t
Parameter setter block (PID)
G1 connection terminal (to the primary control block PB)
G2 connection terminal (to the primary control block TI)
G3 connection terminal (to the primary control block TD)
A1 parameter (PB)
A2 parameter (TI)
A3 parameter (TD)
81
10
9 5
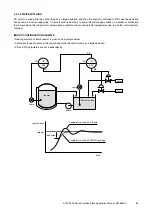
Sequential control block
11
12
13
14
15
16
17
18
19
20
1 3 0 0 0 0
0 1 8 0 0 3
0 7 0 2 1 1
0 1 3 0 1 2
0 7 0 2 0 7
1 1 3 2 0 1
0 2 3 0 1 2
1 1 3 3 0 1
0 2 0 3 0 3
0 7 0 2 1 0
ST
IN
OT
IN
OT
SH
NI
SH
NI
OT
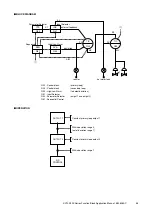
STEP 00
G80 - 03 System’s internal SW (always ON)
A/M SW (primary loop)
G30 - 12 (large deviation)
G02 - 07 Output compensation SW (primary loop)
G32 - 01 Sending PD parameters
G30 - 12 (small deviation)
G33 - 01 Sending PID parameters
C/L SW (secondary loop)
G02 - 10 External feedback SW (primary loop)
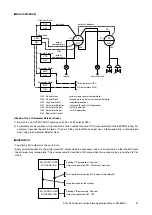
[Parameters]
• PID control: Normal setting
• PD control: Set a PB value slightly smaller than and a TD value slightly larger than the respective values for PID.
• Manual reset: Equal to MV value when the deviation equals ‘0.’
• Deviation and deadband set values: Set the above values first and choose appropriate deviation and deadband values so
to avoid integral (reset) windup while maintaining the shortest rise time.
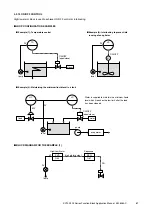
G80 - 03
PRI A/M
G30 - 12
output
compensation
SEC C/L
G02 - 10
G32 - 01
G30 - 12
G33 - 01
Always setting the primary loop to Auto
Manual reset is valid at PD control
Sending PD parameters
Sending PID parameters
Turning on the primary loop external feedback SW
when the secondary loop is set to Loc mode
(large negative deviation)
(small negative deviation)







































































