























19
SC100/200 Series Function Block Application Manual EM-6460-C
•
Auto-tracking bumpless transition
The integral and derivative terms are adjusted automatically to avoid a bump in the control output signal when the control is
switched from manual to automatic, or when a PID constant is changed.
Adjustments are applied when:
• A/M SW is turned from 0 (Manual) to 1 (Auto).
• Preset value SW is turned from 1 (Preset) to 0 (Cancel).
• Output hold SW is turned from 1 (Hold) to 0 (Cancel).
• I/O compensation SW is turned from 0 (Cancel) to 1 (With) or from 1 (With) to 0 (Cancel).
• External feedback SW is turned from 1 (With) to 0 (Cancel)
• Error status is cancelled.
• Maintenance SW (lock command) is turned from 1 (PROGRAM mode) to 0 (MONITOR mode).
• A PID parameter is changed.
• The Controller is at the startup.
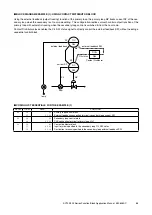
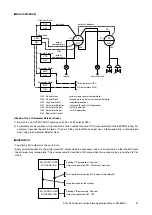
4.2.6 OUTPUT COMPENSATION (Advanced PID)
Output compensation is a function applied to the output of PID control.
•
Output compensation SW (Terminal 07, ITEM 47)
The output compensation is applied in the method specified with ITEM 48 when the switch is turned on. Use the terminal 07
to control it from a sequential control block.
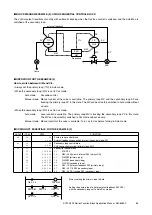
•
Output compensation method (ITEM 48)
0 : Without compensation
1 : Addition ..........................An external signal is added to the PID output.
2 : Subtraction .....................An external signal is subtracted from the PID output.
3 : Substitution ....................An external signal is supplied as the PID output.
Used also to reroute the PID output for an external computation function. The con-
trol output with output compensation may bump when the control is switched from
Manual to Auto.
•
Output compensation connection terminal (ITEM 49)
Used to specify Group and Terminal No. of the external signal used for output compensation.
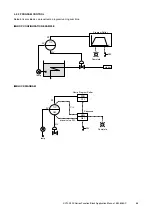
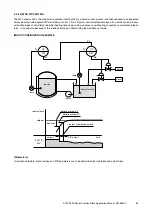
4.2.7 OUTPUT LIMITS
•
Output high/low limits (ITEM 50, 51)
Used to limit the highest and lowest control outputs within certain range. When the output reaches either of the limits, the in-
tegral term is adjusted so that the output remains at the limit. This prevents the integral term acting excessively, and reduces
overshooting caused by integral windup when the deviation is reversed to the direction toward inside of the limits.
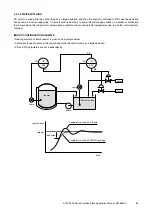
•
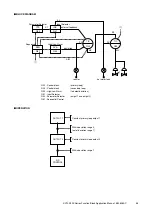
Output rate-of-change limit (ITEM 54) (Advanced PID)
Used to limit the rate-of-change in control output. Typically used to prevent a boiler from abrupt load disturbance by limiting
opening/closing speed of a large steam valve.







































































