





























AKD PDMM User Guide | 11.2.4.5 1:1 customer table motion task
The standard handling for a stand-alone motion task, which means that this motion task does not trigger
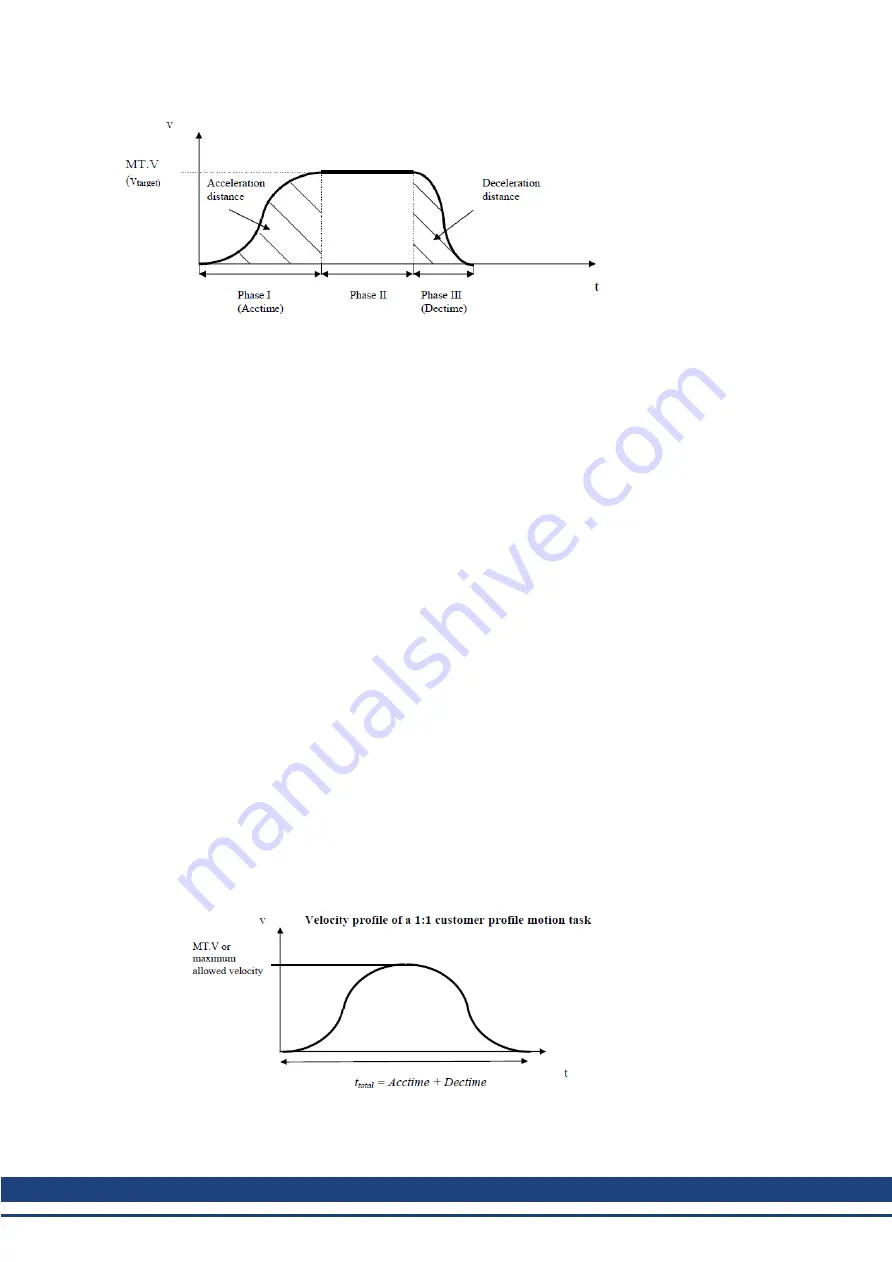
automatically a following motion task, can be separated in three different phases:
1. Phase I: The drive steps within a pre-calculated acceleration time through the first half of the
motion profile table and reaches finally the requested target velocity of the motion task.
2. Phase II: The drive inserts a constant velocity phase and checks continuously if a brake-point
has been crossed. The brake-point is naturally the target position minus the deceleration dis-
tance.
3. Phase III: The drive steps into the second half of the motion profile table and reaches finally the
requested target position when the velocity becomes zero. The step into the second half of the
motion profile table is a critical point and requires a symmetric table and the value of 231 at
entry number_of_table_points / 2 + 1 as explained in the chapter Restrictions for a customer
table.
11.2.4.5 1:1 customer table motion task
The 1:1 customer table motion task is basically very similar to the standard customer table motion task
handling with just a few small differences.
1. The 1:1 customer table motion task does not step out of the table after an acceleration process
and inserts a constant profile (Phase II in the chapter above). The 1:1 handling steps within a
pre-calculated time through the whole table in one go and cover the required distance.
2. A change-on-the-fly from one motion task to another without finishing the first motion task is not
possible for this mode.
3. The 1:1 profile does not use different acceleration and deceleration values. The AKD calculates
the sum of the acceleration time and deceleration time and uses this total time (total¬=
MT.V/DRV.ACC+MT.V/MT.DEC) for the motion task as explained in the following picture. In
case that the accele deceleration time is too small for moving a certain distance, which
would lead into a too large peak-velocity, the total time will automatically be extended to the
required value in order to not exceed the maximum allowed velocity (the minimum of MT.V or
VL.LIMITP and VL.LIMITN).
81
Kollmorgen™ | December 2012
Содержание AKD PDMM series
Страница 25: ...This page intentionally left blank 25 Kollmorgen December 2012...
Страница 32: ...This page intentionally left blank 32 Kollmorgen December 2012...
Страница 52: ...This page intentionally left blank 52 Kollmorgen December 2012...
Страница 101: ...AKD PDMM User Guide 12 3 6 2 Biquad Calculations 101 Kollmorgen December 2012...
Страница 133: ...This page intentionally left blank 133 Kollmorgen December 2012...
Страница 158: ...AKD PDMM User Guide 17 Connection Diagrams Kollmorgen December 2012 158...
Страница 246: ...AKD PDMM User Guide 26 6 DIN1 INV to DIN7 INV Digital Inputs and Outputs 246 Kollmorgen December 2012...
Страница 340: ...AKD PDMM User Guide 33 11 FBUS TYPE 2 EtherCAT 3 CANopen 4 EthernetIP 5 Profinet 340 Kollmorgen December 2012...
Страница 470: ...AKD PDMM User Guide 48 27 VL THRESH 1 Velocity Loop 470 Kollmorgen December 2012...
Страница 511: ...This page intentionally left blank 511 Kollmorgen December 2012...
Страница 513: ...This page intentionally left blank 513 Kollmorgen December 2012...







































































