





























AKD PDMM User Guide | 15.1 Fault and Warning Messages
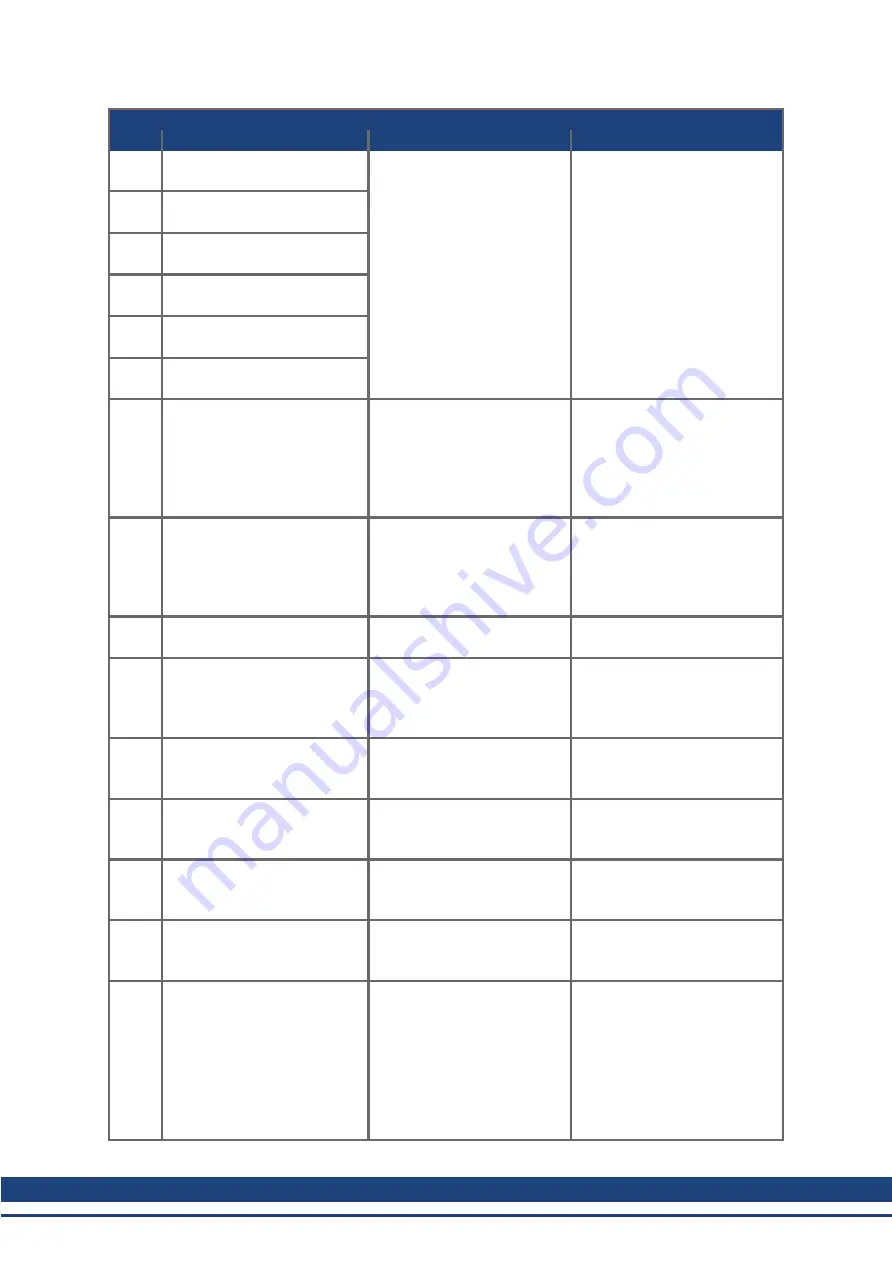
Fault
Message/Warning
Cause
Remedy
F453 Tamagawa communication
fault (timeout).
Bad communication with the
feedback device. Cabling or
shielding fault, or internal feed-
back failure.
Check the cabling to the drive
and if the problem persists then
return the feedback to the man-
ufacturer for repair.
F454 Tamagawa communication
fault (transfer incomplete).
F456 Tamagawa communication
fault (CRC).
F457 Tamagawa communication
fault (start timeout).
F458 Tamagawa communication
fault (UART Overrun).
F459 Tamagawa communication
fault (UART Framing).
F460 Tamagawa encoder fault (over
speed).
This fault is generated when
the shaft is rotated above a
maximum speed that can be
maintained while the external
battery is powered and the
drive is powered off.
Reset the fault on the drive with
DRV.CLRFAULTS.
F461 Tamagawa encoder fault
(counting Error).
When the feedback is powered
on the position (within one rev-
olution) was incorrect because
of a problem with the feedback
device.
Reset the fault on the drive with
DRV.CLRFAULTS, if the prob-
lem persists then clean the feed-
back code plate.
F462 Tamagawa encoder fault
(counting overflow).
Multi-turn counter has over-
flowed.
Reset the fault on the drive with
DRV.CLRFAULTS.
F463 Feedback overheat fault.
The temperature of the
encoder substrate exceeds
overheating detection tem-
perature during main power-on.
Reset the fault on the drive with
DRV.CLRFAULTS after tem-
perature of encoder is lowered.
F464 Tamagawa encoder fault (multi-
turn error).
Any bit-jump occurs in the
multi-turn signal during main
power-on.
Return to the origin. Reset the
fault on the drive with
DRV.CLRFAULTS.
F480 Fieldbus command velocity too
high.
Fieldbus command velocity
exceeds VL.LIMITP.
Lower fieldbus command tra-
jectory, or increase the value of
VL.LIMITP.
F481 Fieldbus command velocity too
low.
Fieldbus command velocity
exceeds VL.LIMITN.
Increase fieldbus command tra-
jectory, or decrease the value of
VL.LIMITN.
F486 Motor velocity exceeds EMU-
speed.
Motor velocity exceeds the
maximum speed the emulated
encoder output can generate.
Reduce value of DRV.EMU-
EPULSEIDTH.
F493 Invalid commutation detected -
motor accelerating in the wrong
direction. Motor phase may be
incorrect.
The velocity of the motor
exceeded WS.CHECKV and
the sign of the current was not
equal to the sign of motor
acceleration or the sign of
motor velocity for a period of
time larger than
WS.CHECKT.
1. Check motor phase wiring
2. Re-configure wake and shake
(if Mode 0 or 1 is used)
3. Re-run wake and shake to
determine correct commutation
angle
143
Kollmorgen™ | December 2012
Содержание AKD PDMM series
Страница 25: ...This page intentionally left blank 25 Kollmorgen December 2012...
Страница 32: ...This page intentionally left blank 32 Kollmorgen December 2012...
Страница 52: ...This page intentionally left blank 52 Kollmorgen December 2012...
Страница 101: ...AKD PDMM User Guide 12 3 6 2 Biquad Calculations 101 Kollmorgen December 2012...
Страница 133: ...This page intentionally left blank 133 Kollmorgen December 2012...
Страница 158: ...AKD PDMM User Guide 17 Connection Diagrams Kollmorgen December 2012 158...
Страница 246: ...AKD PDMM User Guide 26 6 DIN1 INV to DIN7 INV Digital Inputs and Outputs 246 Kollmorgen December 2012...
Страница 340: ...AKD PDMM User Guide 33 11 FBUS TYPE 2 EtherCAT 3 CANopen 4 EthernetIP 5 Profinet 340 Kollmorgen December 2012...
Страница 470: ...AKD PDMM User Guide 48 27 VL THRESH 1 Velocity Loop 470 Kollmorgen December 2012...
Страница 511: ...This page intentionally left blank 511 Kollmorgen December 2012...
Страница 513: ...This page intentionally left blank 513 Kollmorgen December 2012...







































































