






















8
Deutsch
5
“Zurück zur Ladestation”-Taste
6
Wischtuch
7
Bürste
8
Akkufach
9
Rad
10
Absturzsensor
11
Kollisionssensor
12
Seitenbürste
13
Ultraschallsensor
14
3D-Sensor mit Kamera
15
Ladekontakte
16
Wischtuchhalterung
17
Bürstenabdeckung
18
Staubbehälter
19
Wassertank
20
Reinigungswerkzeug
21
Ladestation
22
Netzstecker
Funktionsbeschreibung
Das Gerät besteht aus einer Ladestation und einem ak-
kubetriebenen Reinigungsroboter.
Der mobile Reinigungsroboter bezieht seine Energie
aus einem eingebauten Akku. Mit einer Akkuladung
kann der Reinigungsroboter bis zu 120 Minuten reini-
gen. Lässt die Akkuladung nach, kehrt er selbstständig
in die Ladestation zurück, um sich aufzuladen.
Der Reinigungsroboter bewegt sich systematisch. Mit-
hilfe des 3-D- Lasersensors mit Kamera (LiDAR) scannt
er den Raum und reinigt diesen schrittweise. Hindernis-
sen, die min. die Höhe des LiDAR-Turms aufweisen,
weicht er aus.
Künstliche Intelligenz hilft dem Reinigungsroboter kom-
plexe Hindernisse wie Kabel oder Schuhe störungsfrei
zu umfahren.
Durch die Berechnung der intelligenten Fahrstrategie
durch die künstliche Intelligenz und die anschließende
Hindernisumfahrung kann es je nach Hindernis-Situati-
on einige Sekunden dauern, bis der Roboter seine re-
guläre Fahrt wieder aufnimmt, um die freie Fläche in
geraden Bahnen zu reinigen.
Die flache Konstruktion des Reinigungsroboters macht
es möglich, dass er auch unter Möbeln wie Bett, Sofa
und Schrank reinigen kann.
Der Ultraschallsensor erkennt Teppiche und weicht die-
sen bei der Nassreinigung bzw. der Kombireinigung
aus. Bei der reinen Trockenreinigung erhöht das Gerät
seine Saugleistung auf Teppichen (Autoboost).
Absturzsensoren, die Treppen und Absätze erkennen,
verhindern Abstürze.
Kollisionssensoren erkennen Hindernisse und weichen
diesen aus.
In der Ladestation wird der Akku des Reinigungsrobo-
ters geladen.
Beginnt der Reinigungsroboter die Reinigungsarbeit
von der Ladestation aus, kehrt er bei mangelnder Akku-
ladung wieder zur Ladestation zurück.
Sobald der Ladeprozess beendet ist, verlässt der Reini-
gungsroboter selbsttätig die Ladestation und setzt die
Reinigungsarbeit fort. Wenn der Reinigungsroboter die
Reinigungsarbeiten abgeschlossen hat, kehrt er zur
Aufladung zur Ladestation zurück.
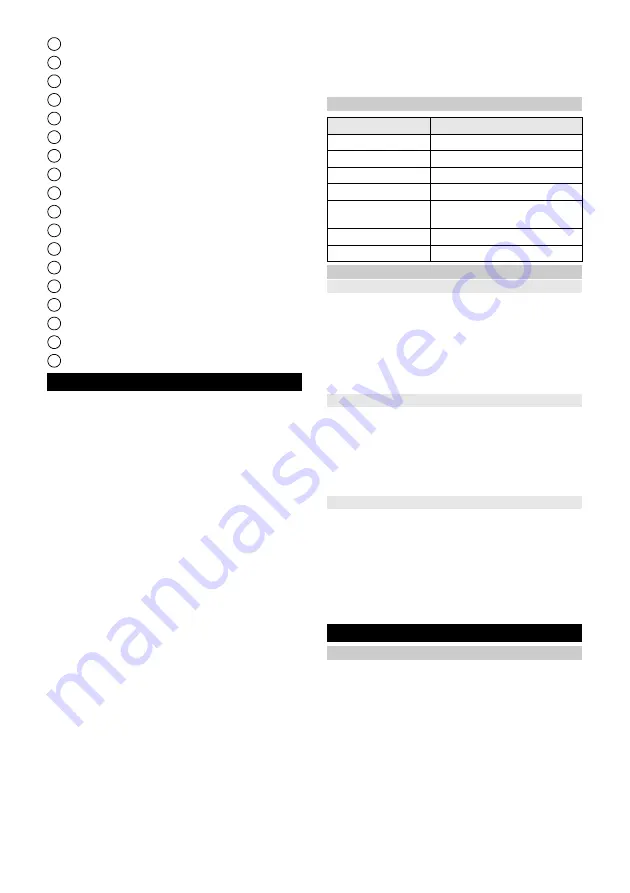
Statusanzeigen
Funktionen
Schlafmodus
Der Reinigungsroboter wechselt nach 5 Minuten Inakti-
vität automatisch in den Schlafmodus. Drücken Sie eine
beliebige Taste, um ihn aufzuwecken.
●
Der Reinigungsroboter wechselt nicht in den Schlaf-
modus, wenn er auf der Ladestation steht.
●
Der Reinigungsroboter schaltet sich automatisch
aus, wenn er sich länger als 6 Stunden im Schlaf-
modus befindet
Fehlermodus
Wenn der Reinigungsroboter während des Betriebs auf
einen Fehler stößt, blinkt die Anzeige rot und es ertönt
ein Signal.
Für eine Lösung, siehe Kapitel
.
Wenn innerhalb von 5 Minuten keine Maßnahmen er-
griffen werden, wechselt der Reinigungsroboter auto-
matisch in den Schlafmodus.
“Nicht stören” Modus
Der "Nicht stören" Modus ist standardmäßig eingestellt.
Im Modus "Nicht stören" nimmt der Reinigungsroboter
eine abgebrochene Reinigung nicht wieder auf, führt
keine geplanten Reinigungen durch und gibt keine
akustischen Warnungen aus.
Der "Nicht stören" Modus kann in der App deaktiviert
werden. Das Herunterladen der App ist im Kapitel
nigungsroboter mit WLAN und App verbinden
ben.
Erstinbetriebnahme
Ladestation aufstellen
몇
WARNUNG
Der Reinigungsroboter RCV 5 darf nur an der Ladevor-
richtung einer Ladestation mit der Teilenummer 9.773-
014.0 geladen werden.
●
Den Standort so wählen, dass der Reinigungsrobo-
ter die Ladestation problemlos erreichen kann.
●
Links und rechts von der Ladestation einen Abstand
von mindestens 0,5 m und vor der Ladestation ei-
nen Abstand von mindestens 1,5 m sicherstellen.
●
Der Standort darf keinem direktem Sonnenlicht aus-
gesetzt sein.
1. Ladestation aufstellen.
Abbildung B
LED-Anzeige
Status
Leuchtet blau
Fährt autonom
Blinkt langsam blau
Autonome Fahrt pausiert
Blinkt schnell blau
WLAN-Verbindungsmodus
Blinkt langsam grün Reinigungsroboter lädt
Leuchtet grün
Reinigungsroboter voll geladen
bzw. erfolgreich verbunden
Blinkt langsam rot
Akku zu leer zum Starten
Blinkt schnell rot
Fehlerfall
Содержание RCV 5
Страница 2: ...A 2...
Страница 3: ...B C D E F G H I 3...
Страница 4: ...J K L M N O P Q 4...
Страница 5: ...R S T U V W 5...
Страница 111: ...111 RCV 5 9 773 014 0 0 C 0 C 35 C LiDAR LiDAR LiDAR 30 mA IEC 60364 1 K RCHER K RCHER RCV 5 RCV 5...
Страница 115: ...115 1 on off 15 2 3 on off WLAN 1 on off 1 2 on off 3 1 2 1 2 3 on off 1 2...
Страница 118: ...118 1 0 C 35 C 1 0 C 35 C 1 1 2 1 1 1 1 1 2 1 1 1 2 1 1...
Страница 130: ...130 8 RCV 5 9 773 014 0 0 C 0 C 35 C LiDAR LiDAR LiDAR 30 IEC 60364 1 K RCHER...
Страница 134: ...134 Reset 10 WLAN WLAN WLAN 1 15 2 3 WLAN 1 1 2 3 1 2...
Страница 135: ...135 1 2 3 1 2 3 M a b c 4 G 5 6 7 8 1 2 3 M a b c 4 G 5 1 2 3 4 O 5 G 6 1 2 3 N a b c d e 4 5 1 2 3 4 5...
Страница 137: ...137 6 R a b 7 6 12 1 S a b c d 2 T a b c 3 6 LiDAR 1 2 U 3 1 2 1 0 C 35 C 1 0 C 35 C 1 1 2 1 1 1 1 1 2...
Страница 138: ...138 1 1 1 2 1 1 0 C 35 C 1 0 C 35 C 1 LiDAR 1 2 3 1 2 1 1 1 1 2 1 1 1 WLAN WLAN 1 WLAN 2 WLAN 3 WLAN WLAN 5 WLAN 1 WLAN...
Страница 216: ...216 8 RCV 5 9 773 014 0 0 C 0 C 35 C LiDAR LiDAR LiDAR 30 mA IEC 60364 1 K RCHER K RCHER RCV 5 RCV 5...
Страница 220: ...220 Wi Fi Wi Fi 1 15 2 3 Wi Fi Medium Turbo Medium 1 1 2 3 1 2 1 2 3...
Страница 221: ...221 1 2 3 M a b c 4 G 5 6 7 8 1 2 3 M a b c 4 G 5 1 2 3 4 O 5 G 6 1 2 3 N a b c d e 4 5 1 2 3 4 5 LiDAR...
Страница 223: ...223 6 12 1 S a b c d 2 T a b c 3 6 LiDAR 1 2 U 3 1 2 1 0 C 35 C 1 0 C 35 C 1 1 2 1 1 1 1 1 2...
Страница 224: ...224 1 1 1 2 1 1 0 C 35 C 1 0 C 35 C 1 LiDAR 1 2 3 1 2 1 1 1 1 2 1 1 1...
Страница 253: ...253 IEC 60825 1 2014 1 8 RCV 5 9 773 014 0 0 C 0 C 35 C LiDAR LiDAR LiDAR 30 IEC 60364 1...
Страница 255: ...255 Autoboost 5 6 5 RCV 5 9 773 014 0 0 5 1 5 1 B 2 C 3 D 1 2 3 3 K rcher Home Robots Wi Fi 2 4 Wi Fi...
Страница 257: ...257 1 15 2 3 1 1 2 3 1 2...
Страница 258: ...258 1 2 3 1 2 3 M a b c 4 G 5 6 7 8 1 2 3 M a b c 4 G 5 1 2 3 4 O 5 G 6 1 2 3 N a b c d e 4 5 1 2 3 4 5 LiDAR...
Страница 260: ...260 6 12 1 S a b c d 2 T a b c 3 6 LiDAR 1 2 U 3 1 2 1 0 C 35 C 1 0 C 35 C 1 1 2 1 1 1 1 1 2 1 1 1 2...
Страница 261: ...261 1 1 0 C 35 C 1 0 C 35 C 1 LiDAR 1 2 3 1 2 1 1 1 1 2 1 1 1 Wi Fi 1 Wi Fi 2 Wi Fi 3 Wi Fi Wi Fi 5 Wi Fi 1 Wi Fi...
Страница 263: ...263 1 IEC 60825 1 2014 8 RCV 5 9 773 014 0 0 C 0 C 35 C LiDAR LiDAR LiDAR 30...
Страница 265: ...265 3D LiDAR LiDAR Autoboost 5 6 5 WLAN RCV 5 9 773 014 0 0 5 1 5 1 B 2 C 3 D 1 2 3 3 WLAN WLAN WLAN...
Страница 267: ...267 3 10 WLAN WLAN WLAN 1 15 2 3 WLAN Standard 1 1 2...
Страница 268: ...268 3 1 2 1 2 3 1 2 3 M a b c 4 G 5 6 7 8 1 2 3 M a b c 4 G 5 1 2 3 4 O 5 G 6 1 2 3 N a b c d e 4 5 1 2 3 4 5...
Страница 270: ...270 4 5 6 R a b 7 6 12 1 S a b c d 2 T a b c 3 6 LiDAR 1 2 U 3 1 2 1 0 C 35 C 1 0 C 35 C 1 1 2 1 1 1 1 1 2...
Страница 271: ...271 1 1 1 2 1 1 0 C 35 C 1 0 C 35 C 1 LiDAR 1 2 3 1 2 1 1 1 1 2 1 1 1...
Страница 274: ...274 1 1 0 35 1 0 35 1 LiDAR 1 2 3 1 2 1 1 1 1 2 1 1 1 Wi Fi Wi Fi 1 Wi Fi 2 Wi Fi 3 Wi Fi Wi Fi 5 Wi Fi 1 Wi Fi...
Страница 277: ...277 Wi Fi 1 1 2 3 1 2 1 2 3 1 2 3 M a b c 4 G 5 6 7 8 1 2 3 M a b c 4 G 5 1 2 3 4 O 5 G 6 1 2 3 N a b c d e 4 5...
Страница 282: ......
Страница 283: ......







































































