





























- 154 -
6 Trial Running
6
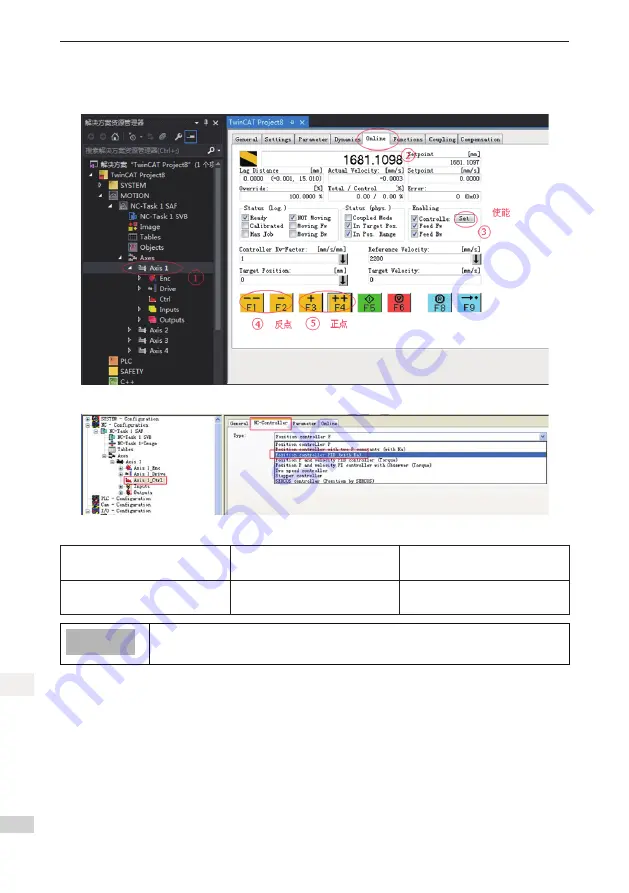
9. Perform the test run of the NC axis.
a) Click "Set" to open the pop-up dialog box, then click "All," the servo drive is now enabled. Click F1 to
F4 to carry out the jog running.
b) You can set the control type.
c) PID type of control loop:
Position loop: Drive
Speed loop: Drive
Drive: Position mode
Position Controller P
Position loop: TWinCAT NC
Speed loop: Drive
Drive: Velocity mode
Position Controller PID (With Ka)
Note
The TWinCAT NC controller can also implement the speed loop, and sends the target torque
to the drive in each cycle. This method however, actually increases the CPU and network load,
and is not recommended.
Содержание SV820N Series
Страница 127: ...126 6 Trial Running 6 6 5 6 PLC Program 1 Add an FB file that edits the function block in the application...
Страница 128: ...127 6 Trial Running 6 2 The definition part of FB 3 Five function blocks in FB...
Страница 141: ...140 6 Trial Running 6 In section0 call the function block then the axis can be moved by the bus...
Страница 143: ...142 6 Trial Running 6 3 Open Visual studio and create a New Twincat3 Project...
Страница 146: ...145 6 Trial Running 6 Click OK Click OK...
Страница 147: ...146 6 Trial Running 6 Click Yes Click OK...
Страница 149: ...148 6 Trial Running 6 C The default RPDO list is as follows...
Страница 150: ...149 6 Trial Running 6...
Страница 152: ...151 6 Trial Running 6 7 Activate the configuration and switch over to the running mode Click...
Страница 157: ...156 6 Trial Running 6 Add a motion control library making it easy to call the control function block...
Страница 158: ...157 6 Trial Running 6 Create a new POU...
Страница 159: ...158 6 Trial Running 6 Create a new FB add MC_power MC_jog MC_home MC_absolute MC_reset to FB...
Страница 160: ...159 6 Trial Running 6 Call axis_motion in main Call the program in PLCTASK...
Страница 161: ...160 6 Trial Running 6 Compile the program if there is no fault configuration can be activated and then log in to the PLC...
Страница 181: ...Revision History Date Revised Version Revised Details May 2017 A00 First release...







































































