





























- 50 -
3 Wiring
3
Note
Improper use of battery may result in battery leakage which will corrode the components or
cause the battery to explode. Observe the following precautions during use:
1.
Place the battery in the c/– polarity;
2. If you place a battery that has been used for a long time or a dead battery in the device,
battery leakage may occur, corroding surrounding components; as the battery is conductive
it may cause a short circuit. Replace the battery periodically (recommended period: Every 2
years).
3. NEVER decompose the battery, so as to prevent personal injury by spraying of electrolyte.
4.
NEVER put the battery in a fire. Failure to comply may result in an explosion.
5. Prevent a battery short circuit, and never strip the battery tube. Do not connect metal to
the electrodes of the battery. Otherwise, a large current is produced, weakening the battery
power which could result in an explosion due to severe heating.
6. This battery is not chargeable.
7.
Reminder: Dispose the battery according to local regulations.
Battery selection:
Select an appropriate battery according to the following table.
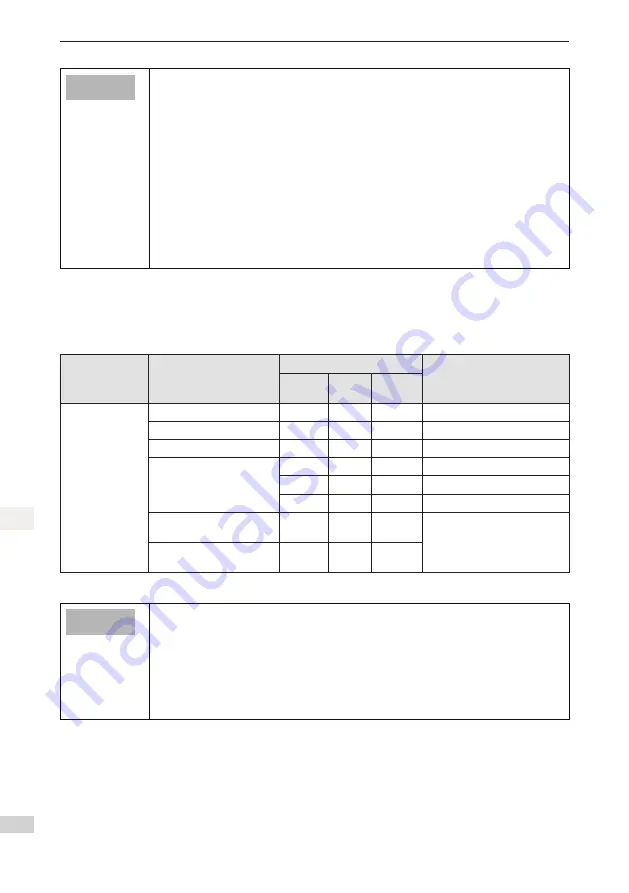
Table 3-12 Battery description for the absolute encoder
Battery
Specification
Item and Unit
Rated Value
Condition
Minimum
Value
Typical
Value
Maximum
Value
Output: 3.6 V,
2,500 mAh
Recommended
manufacturer and
model: Shenzhen
Jieshun Science
and Technology
Industry Co., Ltd.,
LS14500
External battery voltage (V)
3.2
3.6
5
In standby mode*
2
Circuit fault voltage (V)
2.6
In standby mode
Battery alarm voltage (V)
2.85
3
3.15
Current consumed by circuit
(uA)
2
During normal operation*
1
10
In standby mode, axis static
80
In standby mode, axis rotation
Battery working ambient
temperature (
℃
)
0
40
The same as that required by
the motor
Battery storage ambient
temperature (
℃
)
–20
60
The preceding data is measured in the ambient temperature of 20
℃
.
Note
*1: Normal operation means that the absolute encoder can count, receive and send data
generated from single rotation and multiple rotations. After the absolute encoder is correctly
connected , it will work normally and receive and send data after a short delay (about 5
seconds) when the servo drive is powered on. Switching the absolute encoder from standby
mode to normal operation mode (power is on) requires the motor to rotate at a speed less than
10 RPM, otherwise the drive may report 740 error. In this case, power on the servo drive again.
*2: Standby mode means that the servo drive is not powered on and the absolute encoder can
perform multi-rotation counting by utilizing external battery power. In this mode, the absolute
encoder stops receiving and sending data.
Содержание SV820N Series
Страница 127: ...126 6 Trial Running 6 6 5 6 PLC Program 1 Add an FB file that edits the function block in the application...
Страница 128: ...127 6 Trial Running 6 2 The definition part of FB 3 Five function blocks in FB...
Страница 141: ...140 6 Trial Running 6 In section0 call the function block then the axis can be moved by the bus...
Страница 143: ...142 6 Trial Running 6 3 Open Visual studio and create a New Twincat3 Project...
Страница 146: ...145 6 Trial Running 6 Click OK Click OK...
Страница 147: ...146 6 Trial Running 6 Click Yes Click OK...
Страница 149: ...148 6 Trial Running 6 C The default RPDO list is as follows...
Страница 150: ...149 6 Trial Running 6...
Страница 152: ...151 6 Trial Running 6 7 Activate the configuration and switch over to the running mode Click...
Страница 157: ...156 6 Trial Running 6 Add a motion control library making it easy to call the control function block...
Страница 158: ...157 6 Trial Running 6 Create a new POU...
Страница 159: ...158 6 Trial Running 6 Create a new FB add MC_power MC_jog MC_home MC_absolute MC_reset to FB...
Страница 160: ...159 6 Trial Running 6 Call axis_motion in main Call the program in PLCTASK...
Страница 161: ...160 6 Trial Running 6 Compile the program if there is no fault configuration can be activated and then log in to the PLC...
Страница 181: ...Revision History Date Revised Version Revised Details May 2017 A00 First release...







































































