





























Triton Go Product Manual |
Wiring and Connections
INGENIA | 05/29/2017
78
DC tachometer
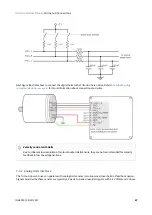
The Triton Go Servo Drive can use a DC tachometer for velocity feedback through the I/O connector. a DC
tachometer provides an analog signal whose voltage level is proportional to the rotor speed.
Next figure illustrates how to connect a DC tachometer with differential output to the Triton Go Servo Drive.
7.4.8 Feedback wiring recommendations
Signal distortion and electrical noise is a common problem in feedback signals
. These problems can result
in a bad position or velocity calculation for both digital feedbacks (gain or loss of counts) and analog feedbacks
(wrong voltage levels).To minimize these problems some
wiring recommendations
are shown:
•
Use differential signals
whenever is possible. That is, connect both positive and negative signals of
differential feedback sensors.
Use a twisted pair for each differential group of signals
and another
twisted pair for the +5 V supply and GND. Twisted-pairs help in elimination of noise because
disturbances induced in twisted pairs
•
Twisted-pairs help in elimination of noise due to electromagnetic fields by twisting the two signal leads
at regular intervals. Any induced disturbance in the wire will have the same magnitude and result in
error cancellation.
•
Connect the Triton Go and encoder GND signals
even if the encoder supply is not provided by the
drive.
•
Connection between Triton Go PE and the motor metallic housing is essential
to provide a low
impedance path and minimize noise coupling to the feedback. For further information, see
•
For better noise immunity, use shielded cables,
with the shield connected to PE only in the drive side.
Never use the shield as a conductor carrying a signal, for example as a ground line.
• It is essential to
keep feedback wiring as far as possible from motor,
AC power and all other power
wiring.
Recommendations for applications witch close feedback and motor lines
In some applications, like in the subsea market, where additional connectors and cables are a problem, the
feedback cannot be wired separately from the motor and power lines. This creates noise problems that could







































































