





























Cheetah Pregius Camera with 10 GigE Vision Interface – User Manual
October 8, 2020
Page
118
of
170
Rev 1.0
Proportional Response
The proportional response is a difference (error) between the setpoint and the process variable.
This error is then multiplied by the proportional coefficient P.
Increasing the P coefficient increases the speed of the control algorithm and
degrades its stability. If the P coefficient is too high, the image luminance
begins to oscillate. With further increase of the P coefficient, the oscillations
become larger, and the system becomes unstable and may even oscillate out
of control.
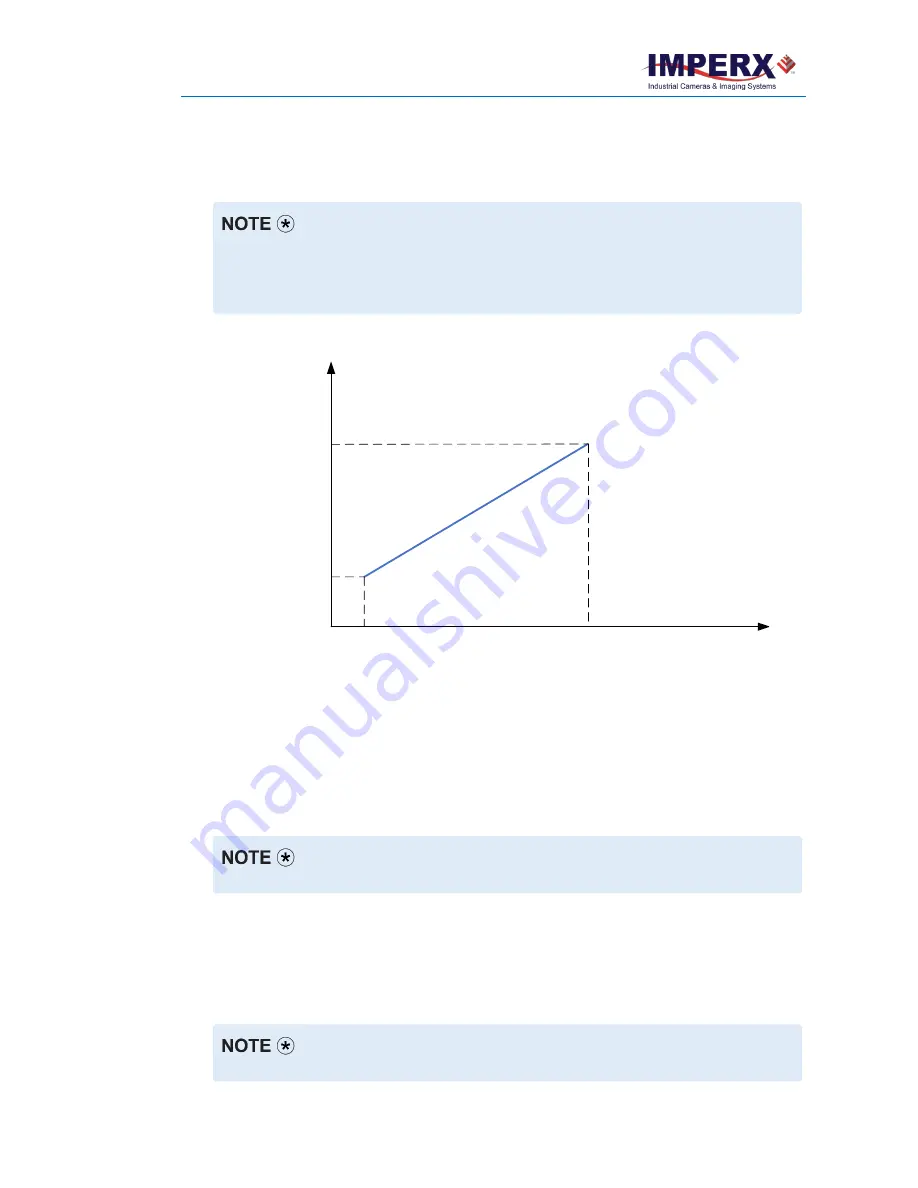
The AEC algorithm uses an adaptive P coefficient.
P coefficient
Exposure
time, µs
36 µs
ExposureAutoExposureForPMax
(25 ms by default )
ExposureAutoPMax
(8.00 by default)
ExposureAutoPMin
(0.04 by default)
The PID controller applies the P coefficient calculated on the previous iteration, computes the
error, and adjusts exposure. The controller then re-calculates the P coefficient and applies the
new value in the next iteration.
Integral Response
The integral response is the sum of the calculated errors over time multiplied by the integral
coefficient I.
Increasing the I coefficient decreases the speed of the control algorithm and
degrades its stability.
Derivative response
The derivative response is the difference between the error found on the previous sample and
the current error multiplied by the derivative coefficient D. The derivative response is sensitive
to noise in the process variable signal. use very small derivative time
Increasing the D coefficient increases the speed of the control algorithm and
improves its stability.







































































